 wejście
wejścieImię chłopca-robota. Dziesięć najbardziej niezwykłych i zaawansowanych robotów na świecie
Mąż wyjechał rano do daczy. A ja i moje dzieci zorganizowaliśmy generalne sprzątanie. Przez półtora miesiąca wracali do domu tylko na noc. „Musimy posprzątać dom po tych brudnych wyborach” – powiedziała Lera. Podczas sprzątania dowiedzieliśmy się, że odkurzacz prawie umarł. Postanowiliśmy kupić nowy. Zebraliśmy się, żeby pójść ścieżką Kolpakova i kupić detergent. Szperał w Internecie. Dotarliśmy do odkurzacza robota. Strasznie podekscytowany. Matvey, przekręcając palec na skroni, wpadł do kawiarni – pozornie bez pracy, a Leroy i ja prawie w nocy – do całodobowego Yulmart. Podczas jazdy mama szlochała do telefonu ze śmiechu: „Robot?!! No, jesteście artystami”… Od śmiechu – bo nie do końca rozumiała powagę naszych intencji.
Sklep zrobił plusk od drzwi. Od razu przyszło do nas czterech sprzedawców: Aleksander, Iwan, Gleb i Robert. "Dobry zakup?" - Pytam o robota. „Tak”, mówi Gleb, „oryginał”. Leroy i ja spieszymy się ze śmiechu, sprzedawcy też prawie leżą. Podobno tylko jeden człowiek kupił u nas taki odkurzacz. A wczoraj kupiłem kolejny helikopter od zdalne sterowanie... Może też możesz wziąć helikopter? "Ty", mówię, "najpierw zrób nam zdjęcie", dla oryginalności. Przyjedziemy po helikopter innym razem. Potrzebujemy Matveya. " - „Musisz przyjść do nas w Halloween, w kostiumach”, pytają sprzedawcy ze łzami w oczach. - "A ty - wyjaśniam - będzie impreza? Czy wszyscy będą w kostiumach?" - "Ale co to dla ciebie za różnica - śmieją się chłopcy. - Ty, co najważniejsze, chodź" ...
Ogólnie mamy naszego robota. I znowu zaczęli się śmiać. Toczy się, zamiata, opiera się na mnie. Chłopaki wyjaśniają: „To on wącha kochankę”. A także, gdy robot skończy sprzątanie, musi sam zaparkować (!!!) do bazy. "Jak jak?" - krzyczymy. "Muszę powiedzieć:" Fas !!! "- uczą chłopcy.
Instrukcja, która została nam wydrukowana na 28 arkuszach, to piosenka. Nasz nowy przyjaciel ze sztuczną inteligencją podejmuje decyzje zgodnie z obecną sytuacją. Cóż, masz pomysł: twarz oznacza twarz, zemsta oznacza zemstę. A jeśli utknie - próbuje się wydostać !!! Prawie się rozpłakałam. A kiedy nie udaje mu się wydobyć, przerywa bezsensowne próby i przechodzi w stan gotowości. To znaczy, Leroy i ja czekamy!
"Jak powinniśmy nazwać naszego nowego przyjaciela?" - Lera cierpi od kilku godzin. - "Najważniejsze, - mówię - nie Dunduk, inaczej zaprogramujemy go, by był głupi" ... "Zadzwoń do Vova - pisze Naumlyuk w SMS-ie. - Wyobraź sobie: Vladimir, odpierdol się! - lub czarujący" Fuck You , Wołodia! "Naumlyuk, krótko mówiąc, nie rozumiałem, że Leroy i ja zrobiliśmy sobie przyjaciela, a nie chłopca do bicia. Dlatego myślimy o nazwaniu naszego robota Naumlyuk. W tym sensie:" No dalej, Naumlyuk, weź mieszkanie. A jeśli jest głupi, zawsze będziemy mogli mu powiedzieć: „Cóż, ty dunduk, Naumlyuk!”
Generalnie przyjmujemy teraz sugestie, jak nadać imię naszemu nowemu przyjacielowi, który przede wszystkim stara się wydostać z każdej sytuacji, a tylko w skrajnych przypadkach czeka na Leroya i na mnie. I nie zawracaj sobie głowy, on jeszcze tego nie rozgryzł. Ponieważ na pierwsze ładowanie potrzebuje 16 godzin.
A do Aleksandra, Gleba, Iwana i Roberta - milion promieni dobroci w karmie (właśnie napisałem dla nich nazwę sklepu, aby każdy, kto ceni poczucie humoru, pobiegł do nich na zakupy i śmiech). Nigdy w życiu nie widziałem bestsellerów. "Dziękuję - Leroy i ja krzyknęliśmy na pożegnanie - tak bardzo podniosłeś nas na duchu". - "A jak nas wychowałeś!" - krzyknęli chłopcy w odpowiedzi.
PS I proszę zasugerować, jak powinniśmy nazwać robota. Czy naprawdę Naumlyuk?
PPS. Nawiasem mówiąc, mama jest lekko zszokowana. Kazała mi zadzwonić i zgłosić, jak robot wygrywa. Mąż również wydaje się być w szoku. I jeszcze nie powiedzieliśmy, że po przeczytaniu instrukcji dowiedzieliśmy się, że nasz robot powinien być odkurzany raz w miesiącu zwykłym odkurzaczem))
Jaki mechanizm można nazwać robotem?
Jak to często bywa w młodej dziedzinie ludzkiej działalności, wciąż brakuje ugruntowanej, ogólnie przyjętej terminologii w robotyce.
Przejdźmy do gęsto zaludnionego w naszych czasach świata maszyn i mechanizmów. Wielu z nich wykonuje pracę, którą do niedawna człowiek wykonywał sam. Nie posuwajmy się daleko po przykłady. Rozejrzyjmy się. Wielu z nas już nie kręci rączką naszego domowego „młynek” do kawy, ale włącza elektryczny młynek do kawy, który zmieli ziarna kawy w kilka sekund, czyli robi to za nas. To samo dotyczy piły elektrycznej, wiertarki elektrycznej itp. Ale trudno nazwać wszystkie te mechanizmy robotami. O co chodzi? Czym różni się robot na przykład od naelektryzowanego narzędzia?
Ryż. 12. Dwie główne części robota: 1 - siłownik ("ręka") i 2 - "mózg" (urządzenie sterujące "ręką").
Aby zrozumieć najważniejsze, nie będziemy zagłębiać się w kwestie terminologiczne. Dołączmy do opinii tych, którzy uważają, że urządzenie można nazwać robotem, jeśli składa się z dwóch głównych części: siłownika – „ręka” 1 i układu sterującego tym mechanizmem – „mózgu” 2 robota (rys. 12). Ta idea robota od razu wyjaśnia pytanie, dlaczego elektronarzędzia nie są robotami: nie mają, poza prostym przełącznikiem, systemu sterującego siłownikiem (piła, wiertarka itp.).

Ryż. 13. Konstrukcja robota przemysłowego, kompaktowo łącząca jego „ramię” i „mózg”

Ryż. czternaście. Mechaniczne „ramię” robota to manipulator; 1 - przechwytywanie (łącze robocze).
Robot przemysłowy wygląda na przykład tak, jak pokazano na rysunku 13: ten robot ma wyraźnie widoczną „rękę” 1, a „mózg” jest ukryty w ciele 2.
Jak to często bywa w młodej dziedzinie ludzkiej działalności, wciąż brakuje ugruntowanej, ogólnie przyjętej terminologii w robotyce. Spory wśród ekspertów o to, jaki mechanizm można nazwać robotem, do dziś nie ustępują. A ludzie, którzy nie są związani z robotyką, często myślą, że robot to urządzenie, które wykonuje określone operacje pracy dla osoby. Czy tak jest?
Przejdźmy do gęsto zaludnionego w naszych czasach świata maszyn i mechanizmów. Wielu z nich wykonuje pracę, którą do niedawna człowiek wykonywał sam. Nie posuwajmy się daleko po przykłady. Rozejrzyjmy się. Wielu z nas już nie kręci rączką naszego domowego „młynek” do kawy, ale włącza elektryczny młynek do kawy, który zmieli ziarna kawy w kilka sekund, czyli robi to za nas. To samo dotyczy piły elektrycznej, wiertarki elektrycznej itp. Ale trudno nazwać wszystkie te mechanizmy robotami. O co chodzi? Czym różni się robot na przykład od naelektryzowanego narzędzia?
Ryż. 12. Dwie główne części robota: 1 – siłownik („ręka”) oraz 2 – „mózg” (urządzenie sterujące „ręką”).
Aby zrozumieć najważniejsze, nie będziemy zagłębiać się w kwestie terminologiczne. Dołączmy do opinii tych, którzy uważają, że urządzenie można nazwać robotem, jeśli składa się z dwóch głównych części: siłownika – „ręka” 1 i układu sterującego tym mechanizmem – „mózgu” 2 robota (rys. 12). Ta idea robota od razu wyjaśnia pytanie, dlaczego elektronarzędzia nie są robotami: nie mają, poza prostym przełącznikiem, systemu sterującego siłownikiem (piła, wiertarka itp.).

Ryż. 13. Projekt robota przemysłowego, kompaktowo łączącego jego „ramię” i „mózg”

Ryż. 14. Mechaniczne „ramię” robota – manipulator; 1 - przechwytywanie (łącze robocze).
Robot przemysłowy wygląda na przykład tak, jak pokazano na rysunku 13: ten robot ma wyraźnie widoczną „rękę” 1, a „mózg” jest ukryty w ciele 2.
Najtrudniejszą częścią budowy robota jest, podobnie jak w ludzkim ciele, „mózg”. Dlatego zacznijmy naszą znajomość robota od jego prostszej części - siłownika.
Jeśli planujesz założyć własny klub robotyki, ale nie jesteś pewien, czy sam potrafisz wybrać odpowiednią nazwę, ten artykuł pomoże Ci w łatwym wyborze Najlepszym sposobem... W tym artykule przytoczono przykłady nazw już istniejących środowisk działających na terenie całego kraju, a także opisujemy, jak takie nazwy konstruować.
Zasady tworzenia nazw szkół robotyki
Wszystkie takie nazwy można z grubsza podzielić na dwie główne grupy. Po zapoznaniu się z opisem każdego z nich, a także przestudiowaniu poglądowych przykładów, przedsiębiorca będzie mógł szybko i łatwo stworzyć własną, żywą i zapadającą w pamięć wersję.
- Nazwy zawierające słowo „robot”, „robbo”, „robo”. Użycie tych słów kluczowych sprawia, że nazwa jest jak najbardziej tematyczna, tj. wybierając tę metodę gwarantujesz sobie, że Twój klub nie będzie mylony ani ze szkołą językową, ani ze sklepem elektronicznym. Mogą być też dość zróżnicowane, głównie ze względu na użycie innego słownictwa lub zmiany w słowo kluczowe, na przykład „Robotex”, „Laboratorium Robotyki”, „Liga Robotów”, „Robbo” itp.
- Inne nazwy. Zdecydowana większość nazw z tej kategorii jest również tematyczna, tj. związane z robotami, technologią lub po prostu wiedzą, np. „Dwumian Newtona”, „Zhelezyaki”, „Akademia geniuszy”, „Inteligentne moduły”, „ELEKTRONIKA” itp.
Roboty. To wciąż egzotyczne, ale mimo to coraz pewniej wkraczają w nasze życie. Trzy prawa robotyki Isaaca Isimova wkrótce przestaną być tylko literaturą rozrywkową. Roboty to stworzenia, które zarówno fascynują, jak i przerażają swoim człowieczeństwem i jednocześnie maszyną. Produkcja robotów stale się rozwija. Sprawdź dziesięć najciekawszych dotychczasowych przykładów.
ASIMO: humanoidalny robot

ASIMO to humanoidalny robot stworzony przez Hondę. Mierzący 130 centymetrów i ważący 54 kilogramy robot wygląda jak mały astronauta niosący plecak. Potrafi chodzić na dwóch nogach, kopiując chód człowieka z prędkością 6 km/h. ASIMO powstało w Japonii w „Centrum Badawczo-Rozwojowym” Hondy. Ten Najnowszy model w serii, a jest ich w sumie jedenaście, pierwszy robot powstał w 1986 roku.
Oficjalna nazwa robota to skrót od „Advanced Step in Innovative Mobility”, co dosłownie oznacza „Zaawansowany krok w zaawansowanej mobilności.” W 2002 roku było 20 robotów ASIMO. Każda z nich kosztuje milion dolarów, a niektóre można wynająć za 150 000 dolarów miesięcznie.
Rozpoznawanie poruszających się obiektów
Wykorzystując informacje wizualne zebrane przez kamerę wideo zamontowaną w głowie robota, ASIMO rozpoznaje ruchy wielu obiektów, a także szacuje odległość i kierunek od nich. Za pomocą kompleksu tych technologii robot może śledzić ruch ludzi za pomocą kamery, podążać za osobą lub witać się z nią, gdy się zbliża.
Rozpoznawanie póz i gestów
ASIMO potrafi interpretować pozycje i ruchy dłoni, rozpoznawać postawy i gesty. Dzięki temu robot może reagować nie tylko na polecenia głosowe, ale także na naturalne ruchy ciała ludzi. W ten sposób na przykład rozumie, kiedy podaje się mu uścisk dłoni lub kiedy ktoś macha do niego i odwzajemnia się. Ponadto rozumie, kiedy pokazuje mu się kierunek ruchu.
Rozpoznawanie środowiska
ASIMO potrafi analizować otaczające obiekty i krajobraz i działać w taki sposób, aby było to bezpieczne dla niego i osób znajdujących się w pobliżu. Na przykład rozpoznaje potencjalnie ryzykowne obiekty, takie jak schody, i zatrzymuje lub unika ludzi i inne poruszające się obiekty, aby uniknąć kolizji z nimi.
Rozpoznawanie dźwięków
Zdolność robota do rozpoznawania rodzaju dźwięków pogłębiła się i teraz rozpoznaje różnicę między głosami a innymi dźwiękami. Odpowiada na swoje imię, odwraca się twarzą do osoby, z którą rozmawia, reaguje na nagłe, niezwykłe dźwięki, takie jak spadający przedmiot lub kolizja, i odwraca głowę w tym kierunku.
Rozpoznawanie twarzy
ASIMO potrafi rozpoznawać ludzkie twarze, nawet gdy osoba się porusza. Potrafi rozróżnić 10 ludzkich twarzy osobno. Kiedy zostaną zapisane w jego pamięci, odniesie się do nich po imieniu.

Albert Hubo: Robot Einstein

Robot Albert HUBO to robot z systemem Android. Jego wygląd zewnętrzny tworzy głowę, która kopiuje głowę naukowca Alberta Einsteina i tułów dość znanego humanoidalnego robota Hubo. Okres rozwoju trwał trzy miesiące i zakończył się w listopadzie 2005 roku. Głowica została zaprojektowana przez firmę Hanson-Robotics. Korpus wykonany jest ze specyficznego materiału Frubber, często używanego w Hollywood.
Głowa posiada 35 stawów, dzięki czemu może wyrażać różne emocje na twarzy, wykorzystując niezależne ruchy oczu i ust. W głowie znajdują się również dwie kamery CCD do rozpoznawania wizualnego. Ponadto Albert jest w stanie wykonać wszystkie nieodłączne występy Hubo, dzięki czemu możliwe jest wyrażenie jeszcze bardziej naturalnych ludzkich ruchów i zachowań. W korpusie ukryte są polimery baterie litowe które zapewniają około dwóch i pół godziny praca autonomiczna robot.
Robot Albert może być sterowany przez zdalną sieć z komputer zewnętrzny... Albert Humo został po raz pierwszy przedstawiony w 2005 roku na szczycie APEC w Busan (Korea). Był chwalony przez wielu światowych przywódców: prezydenta Stanów Zjednoczonych, premiera Japonii itp.

Stanley: pojazd samojezdny
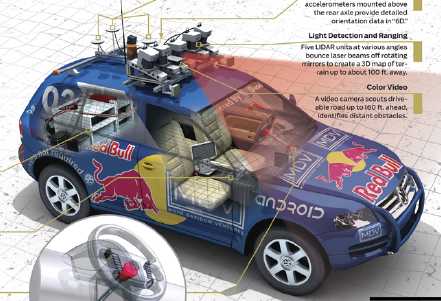
Stanley to autonomiczny pojazd stworzony przez zespół wyścigowy Uniwersytetu Stanforda. To zwykły Volkswagen Tuareg, zmodyfikowany tak, by móc sterować tylko komputerami pokładowymi. Brał udział i wygrał Grand Challenge 2005 DARPA i zdobył dla Stanford Racing Team nagrodę w wysokości 2 milionów dolarów, największą nagrodę pieniężną w historii robotów.
Czujniki używane w Stanley obejmują pięć lidarów laserowych, parę radarów, kamerę stereo i kamerę z jednym obiektywem. Informacje są przetwarzane, a pozycja pojazdu jest określana przez odbiornik GPS, kompas GPS, system sterowania bezwładnościowego, a wewnętrzna magistrala CAN Tuarega odbiera informacje o odometrii kół. Część komputerowa to sześć potężnych komputerów Intel Pentium M z różnymi konfiguracjami i system operacyjny Linuksa.
Stanley jest wyposażony w system wykrywania zbliżających się przeszkód. Dane z lidarów są łączone z obrazami z systemu wizualnego, aby zapewnić pełniejszy obraz ankiety. Jeśli akceptowalna droga nie może zostać rozpoznana przez co najmniej kolejne 40 metrów, prędkość spada, a lidary szukają bezpiecznej ścieżki.
Nawiasem mówiąc, jazda Stanleya została zaprogramowana przy użyciu zapisu jazdy człowieka na pustyni, a następnie ustawienia dokładnej wartości dla każdego bitu informacji generowanej przez jego system czujników. Po tej modyfikacji samochód-robot zaczął toczyć się z prędkością 45 mil na godzinę po drogach przecinanych cieniami drzew. Dopóki nie podano dokładnych wartości danych, samochód wystraszony zjechał z drogi, przekonany, że ścieżkę nie przecinają cienie, ale dziury.

BigDog: muł robota
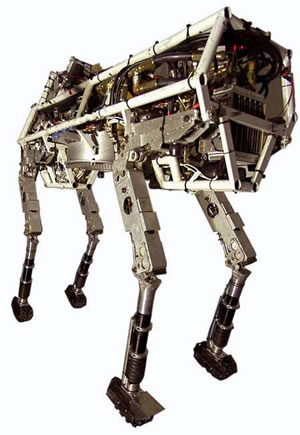
BogDog (BigDog, dosłownie - Big Dog) to czworonożny robot stworzony przez Boston Dynamics w 2005 roku. Projekt BigDog został sfinansowany przez Agencję Obrony Zaawansowanych Badań w nadziei, że stworzenie może służyć jako robot-muł dla żołnierzy w obszarach, które są zbyt trudne do transportu.
BigDog waży 75 kilogramów, ma metr długości i 0,7 metra wysokości. Na ten moment może poruszać się po trudnym terenie z prędkością 5,3 km/h, unieść ciężar 54 kilogramów i wspinać się na wzniesienia o nachyleniu 35 stopni.

RiSE: robot wspinaczkowy

Rise (RiSE) to mały sześcionożny robot, który wspina się po pionowych powierzchniach: ścianach, drzewach, ogrodzeniach. Obcasy Ryze mają pazury, mikropazury lub lepki materiał, w zależności od powierzchni, na którą się wspinają. Robot zmienia pozycje, aby dostosować się do pochyłych powierzchni, a nieruchomy ogon pomaga utrzymać równowagę na stromych powierzchniach. Dzieciak waży tylko 2 kilogramy, ma 0,25 m długości i biegnie z prędkością 0,3 m/s.
Każda z sześciu nóg robota wyposażona jest w dwa silniki elektryczne. Komputer pokładowy steruje łapami, określa sposób komunikacji z podłożem oraz omawia różne czujniki. Zawiera czujnik obliczający bezwładność, czujnik położenia stawu dla każdej łapy, czujnik napięcia łapy i czujnik kontaktu stopy.
Przyszłe wersje Ryze będą używać suchej sztyftu do wspinania się po idealnie gładkich, przezroczystych powierzchniach, takich jak szkło i metal. Rise został opracowany wspólnie przez naukowców z University of Pennsylvania, Carnegie Mellon, Berkeley, Stanford oraz Lewis and Clark University. Projekt był sponsorowany przez Biuro Rzecznictwa Naukowego DARPA.

QRIO: tańczący robot
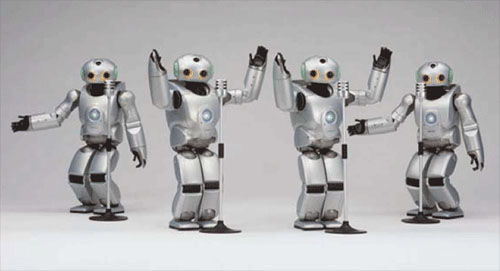
QRIO („Quest for cuRIOsity”) to dwunożny humanoidalny robot rozrywkowy stworzony i sprzedawany przez Sonyę, aby utrzymać przy życiu sukces zabawkowego AIBO (Psiego Robota). QRIO ma 0,6 metra wysokości i waży 7,3 kilograma.
Robot potrafi rozpoznawać głosy i twarze, dzięki czemu może zapamiętywać ludzi oraz ich upodobania i antypatie. Potrafi biec z prędkością 23 cm na sekundę, co zostało zapisane w Księdze Rekordów Guinnessa (2005) jako pierwszy, najszybszy, dwunożny robot, który biega. QRIO czwartej generacji ma godzinną żywotność baterii.
Czwarta generacja tych robotów może tańczyć do Hell Yes, teledysku Becka. Te przykłady są uzupełnione trzecią kamerą czołową i mają ulepszone dłonie i nadgarstki. Programiści pracowali przez trzy tygodnie, aby wytrenować te roboty w choreografii.