 مدخل
مدخلالكشف عن الهدف من Gl sh ogs Hydroacoustics. المجمعات المائية الصوتية رر في الحرب المضادة للغواصات
الغواصات السوفيتية التي تعمل بالديزل والكهرباء لبناء ما بعد الحرب جاجين فلاديمير فلاديميروفيتش
مركبات الألواح المائية السمعية في القتال المضاد
مهدت القوارب التي تعمل بالديزل والكهرباء في مشاريع ما بعد الحرب الأولى "الطريق" لأطقم الغواصات الحديثة ، واكتساب الخبرة في تشغيل المعدات العسكرية في الرحلات البحرية ، وإتقان تقنيات الملاحة تحت الجليد ، ودراسة الوضع الهيدرولوجي والهيدروغرافي من الناحية الاستراتيجية. مناطق مهمة في المحيط ، وممارسة البحث المضاد للغواصات وتكتيكات القتال المضادة للسفن.
غالبًا ما تنحصر تكتيكات الحرب المضادة للغواصات في البحث عن غواصات العدو واكتشافها باستخدام وسائل السونار قبل أن يفعل العدو ذلك.
في الوقت نفسه ، تصبح حالة البيئة المحيطة بالغواصة ذات أهمية قصوى ، لا سيما معايير مثل مناطق التقارب الصوتي وموقع الغواصة بالنسبة إلى "الخط الحراري".
مناطق التقارب هي مناطق على شكل حلقة حول الغواصة. الصوت المتجه لأسفل من نقطة الالتقاء الواقعة في منطقة التقارب ينكسر اعتمادًا على ضغط ودرجة حرارة الماء ، ويتحرك لأعلى ولأسفل بالنسبة للسطح في دوامة على فترات غير منتظمة ، والتي تعتمد أيضًا على حالة البيئة المحيطة الغواصة.
قائد السفينة ، الذي يحاول عدم الدخول إلى هذه المناطق - بالنسبة للمكان ، في رأيه ، الهدف ، يمكن أن يتجنب الكشف. للقيام بذلك ، يجب أن يكون داخل تلك المناطق التي ينتشر فيها الصوت من مصدره ببساطة شعاعيًا.
أسهل طريقة هي اتخاذ موضع أعلى أو أسفل طبقة القفز في درجة الحرارة (خط حراري) أو تحتها بحيث تفصل الغواصات - ومن ثم ستنعكس الأصوات المنبعثة من محركها عن الطبقة ولن يكتشفها قارب العدو هو - هي.
القفزة في درجة الحرارة هي طبقة حدودية للمساحة تحت الماء تفصل المياه السطحية الدافئة عن المناطق العميقة الأكثر برودة.
تحتل غواصات الديزل ، إلى جانب الغواصات النووية ، مكانة بارزة في الخطط العدوانية لقيادة أساطيل دول كتلة الناتو. وفقًا لكتيب جين ، في منتصف عام 1980 ، كان هناك 186 قاربًا ديزلًا في أساطيل دول تحالف شمال الأطلسي.
تتمتع غواصات الديزل بمزايا معينة تتفوق بها على الغواصات النووية ، وتشمل على وجه الخصوص ، تقليل الضوضاء ، مما يحسن ظروف تشغيل المحطات المائية الصوتية (GAS) في حل مشاكل الحرب المضادة للغواصات.
في الوقت الحالي ، وفقًا للصحافة الأجنبية ، كان هناك تكامل للمعدات الصوتية المائية مع CICS وأنظمة التحكم في الأسلحة ، والتي تعتمد على الاستخدام الواسع لأجهزة الكمبيوتر. نتيجة لذلك ، تغيرت القدرات التكتيكية للمعدات المائية الصوتية نوعيًا. زاد احتمال اكتشاف الأهداف وتصنيف الاتصال المستلم. بالإضافة إلى ذلك ، أصبح من الممكن مراقبة عدة أهداف (حتى ستة) في وقت واحد واكتشاف التغييرات بسرعة في مناوراتها ، وتلقي المعلومات تلقائيًا وإصدارها باستمرار لجميع الأنظمة المرتبطة ، وبشكل مرئي ، في شكل مناسب للاستخدام المباشر ، وعرضها على الشاشات و لوحات تسجيل ، والتسجيل إذا لزم الأمر.
سمحت معالجة الإشارات الرقمية لأنظمة الموقع السلبي للغواصة بتحديد الاتجاه والمسافة إليها فقط من ضوضاء الهدف.
أخيرًا ، أدى دمج الأنظمة المستندة إلى الكمبيوتر المختلفة إلى تبسيط التحكم في تشغيل وصيانة GAS وجعل من الممكن تقليل موظفي الصيانة ، وهو أمر لا يستهان به بالنسبة لغواصات الديزل ذات الإزاحة الصغيرة نسبيًا.
المسار الرئيسي للمحطة الصوتية هو مسار تحديد الاتجاه بمدى يصل إلى عدة عشرات من الكيلومترات. في نطاق التردد المنخفض (220 هرتز - 7 كيلو هرتز) ، يتم استقبال الإشارات على هوائي صوتي مطابق (مدمج مع ملامح قوس الهيكل) يتكون من هيدروفيونات بيزوسيراميك ، وفي نطاق التردد العالي (8 كيلو هرتز) ، على هوائي أسطواني به hydrophones مصنوع من زركونات الرصاص ، يقع بالقرب من العارضة. يعمل الهوائي الأسطواني أيضًا على تتبع عدة أهداف (حتى أربعة). كلتا قناتي تحديد اتجاه الضوضاء تكمل بعضها البعض. يتم مسح المنطقة المحيطة عن طريق الاستجواب المتسلسل السريع لعدد كبير من 360 درجة إرسال فصوص اتجاهية مشكلة بشكل ثابت. الأهداف الصاخبة المكتشفة تقع في مواقع المحامل بدقة عالية باستخدام طريقة الإشارة المتساوية.
أتاح المسار النشط إجراء عرض شامل بإشعاع متعدد الاتجاهات لحزمة واحدة أو بإشعاع سلسلة من الحزم في اتجاهات متغيرة بشكل متتابع ، بالإضافة إلى إصدار حزم فردية في اتجاه معين. يتم عرض أصداء استقبالها على شاشة المؤشر ويمكن تسجيلها لقياس انزياح تردد دوبلر.
يحتوي مسار الموقع المنفعل على ثلاثة هوائيات استقبال على كل جانب من الغواصة ، مثبتة بشكل متدفق مع الهيكل في أجزاء القوس والوسط والمؤخرة. يتلقون ضوضاء الهدف ، والتي تخضع لمعالجة الارتباط ، مما يجعل من الممكن تحديد موقع الهدف بدقة كافية باستخدام ثلاثة خطوط للموضع. يمكن استخدام هوائيات المسار كهوائيات إضافية لمسار تحديد اتجاه الضوضاء.
توفر المحطة اتصالات تحت الماء اتجاهية وغير اتجاهية.
يتيح مسار اكتشاف إشارة السونار اكتشاف إشارات النبض من أصول مختلفة على مسافة عدة عشرات من الكيلومترات ، لتحديد ترددها ومدتها واتجاهها إلى مصدر الإشارة.
تستخدم الدوائر المتكاملة على نطاق واسع في تصميم المحطة ، ونتيجة لذلك يتم تقليل أبعادها ووزنها وزيادة الموثوقية. يتم عرض البيانات المستهدفة على شاشتين ويتم إرسالها تلقائيًا إلى جهاز الكمبيوتر الآلي لنظام التحكم في إطلاق الطوربيد ، حيث يتم إنشاء أوامر إطلاق.
كما تم تطوير محطة صوتية مائية أبسط. وهي تشمل مسارات لتحديد اتجاه الضوضاء وإيجاد اتجاه الصدى والموقع السلبي. يتم البحث عن الأهداف وكشفها في وضع تحديد اتجاه الضوضاء باستخدام طريقة الارتباط لمعالجة الإشارة. بعد اكتشاف الهدف ، تُقاس المسافة إليه بإشعاع رسالة فردية موجهة أو بطريقة الموقع السلبي.
من أجل زيادة فعالية استخدام معدات المراقبة المائية الصوتية ، تحتوي الغواصات أيضًا على أدوات لقياس سرعة انتشار الصوت في الماء ولإشارة بداية تجويف المراوح ، وأدوات لمراقبة مستوى الضوضاء الداخلية.
لتحسين كفاءة استخدام HAS ، هناك جهاز لإنشاء أنماط شعاعية بناءً على بيانات الإدخال على التوزيع الفعلي لسرعة انتشار الصوت مع زيادة العمق. النظام قادر على العمل في وضع المحاكاة مع تقليد الإشارات القادمة إلى مدخلاته من أهداف مختلفة. يمكن تسجيل جميع المعلومات الحالية التي تم إدخالها في النظام أثناء عمله القتالي والتي تم إنتاجها من أجل التشغيل والتحليل اللاحقين. يتم تشغيل النظام بواسطة مشغل واحد أو اثنين.
الأنواع الأخرى من الغاز لها هوائيات أسطوانية مقطعة. للحصول على عرض دائري للفضاء ، يتم تشكيل 96 حزمة من مخطط الإشعاع بشكل ثابت.
يتم تحديد إحداثيات الأهداف المكتشفة وتتبع عدة أهداف في وقت واحد في جميع الأوضاع بمساعدة الكمبيوتر. في الوضع النشط ، من أجل الحصول على المدى الأقصى ، يتم توفيره لتنسيق معلمات الإشعاع (القدرة المشعة ، التردد ، نوع تشكيل الرشقات) مع الظروف الهيدرولوجية الفعلية في منطقة المراقبة.
في وضع الكشف عن إشارة السونار ، يتم تحديد اتجاه مصدر الإشارة وترددها واتساعها ومدة النبضات ومعدل تكرارها ، وتصنف مصادر الإشعاع وفقًا لمجموع كل هذه العلامات.
يمكن أن تعمل المحطة أيضًا في أوضاع مساعدة: المحاكاة ، الرسم البياني الشعاعي ومراقبة الحالة الفنية التلقائية ، مما يضمن الكشف عن الوحدات المعيبة.
في وحدة التحكم GAS توجد جميع عناصر التحكم وشاشتين. واحد منهم مع شاشة ثلاثية الألوان ، وهي عبارة عن مؤشر عرض دائري ، يعرض في نفس الوقت في الجزء المركزي الوضع الكامل مع سفينته الخاصة في المركز وقرص المحامل ، وعلى طول الحواف - كامل معلومات نصيةحول الأهداف المتعقبة (المسافات ، المحامل ، تحولات تردد دوبلر ، الدورات ، السرعات) ، بيانات حول مسار وسرعة سفينتك ، حول وضع ومعلمات GAS. في الشاشة الثانية ، يتم عرض المصفوفات الهرمية النصية ، والتي تسمح معالجتها بتحسين عملية التحكم في المعدات. هذا العرض التقديمي للمعلومات يبسط إلى حد كبير صيانة المحطة وتشغيلها ويسمح لمشغل واحد بتنفيذها.
في نوفمبر 1983 ، تم تكليف الغواصة النووية من فئة VICTOR-III بتسجيل الضوضاء والخصائص الأخرى لحاملة الصواريخ الأمريكية الرابعة من فئة أوهايو.
وفقًا للطاقم ، القبطان الشاب الطموح لغواصتنا ، مستوحى من نماذج أبطال الغواصات الحرب الوطنية، قررت أن أذهب تقريبًا إلى خليج قاعدة الخصم.
للتمويه الصوتي ، غطس K-324 في بحر سارجاسو تحت قارب صغير ، متبعًا دورة مناسبة. كان كل شيء يسير على ما يرام ، عندما بدأت سرعة غواصتنا فجأة في الانخفاض بسرعة ، على الرغم من زيادة سرعة التوربينات إلى الحد الأقصى.
لم تؤدِ أي حيل وتخمينات للطاقم إلى نتائج إيجابية - انخفضت السرعة إلى ثلاث عقد.
لا شيء يجب القيام به - كان لابد من الظهور. الظهور على مرمى البصر من الشواطئ الأمريكية ، في "العرين" ذاته ، إذا جاز التعبير.
لفحص البرغي الرئيسي ، تم ملء الدبابات القوسية ، وحصل القارب على تقليم لائق على القوس ، وفحص فريق الطوارئ ، المسلحين ببندقية كلاشينكوف واثنين من PM (الترسانة الكاملة المتوفرة في الغواصة النووية السوفيتية) المؤخرة. لذلك ، تبين أن نوعًا ما من الكبلات ملفوف على العمود ، متين للغاية ، وغير قابل للكسر أو الرشقات التلقائية: كل الجهود كانت بلا جدوى.
قرر القائد الذهاب إلى كوبا على السطح. عندها استولى عليها الطيارون والبحارة والسياح الأمريكيون على اليخوت الترفيهية.
مع حزن نصف زحف إلى كوبا. تم استدعاء القائد على الفور إلى "السجادة". ولكن ، على عكس الافتراضات المحزنة حول مصيره ، عاد القبطان "على ظهور الخيل" - الكبل المشؤوم ، الذي تم لفه حول المسمار بواسطة غواصة يائسة ، تبين أنه ليس أكثر من أحدث هوائي السونار الأمريكي ، والذي تم اختباره على قارب لا يوصف من قبل الأمريكيين المهملين.
تلقى علماؤنا وتقنيونا مواد لا تقدر بثمن لدراسة ...

غواصة الطوارئ K-324 في بحر سارجاسو
من كتاب Battle for the Stars-2. مواجهة الفضاء (الجزء الثاني) مؤلف بيرفوشين أنطون إيفانوفيتشالمجمعات المدارية القتالية لـ Buran نتذكر أن مجمع الصواريخ والفضاء Energia-Buran تم إنشاؤه بأمر من وزارة الدفاع لحل المشكلات العسكرية في الفضاء القريب. من الواضح أنه في نفس الوقت مع المجمع ، تم تطوير الحمولات أيضًا
من كتاب إدارة الجودة مؤلف شيفتشوك دينيس الكسندروفيتش1.2 إدارة الجودة كعامل في نجاح مؤسسة ما في اقتصاد السوق التنافسية كواحدة من أهم الخصائص تشمل المنافسة بين موضوعات وأغراض السوق. المنافسة تشير إلى التنافس بين الأفراد أو
من كتاب السفن الحربية في العالم في مطلع القرنين العشرين والحادي والعشرين الجزء الثالث فرقاطات مؤلف أبالكوف يوري فالنتينوفيتشأنظمة الصواريخ المضادة للطائرات المصنوعة في الولايات المتحدة الأمريكية التكوين الرئيسي TTX "STANDARD * SM-1" STANDARD "SM-2 MK 57 الناتو" SEA SPARROW "" SEA CHAPPAREL "المطور القطري لشركة USA General Dinamics Corporation ، قسم الدفاع الجوي USA General Dinamics Corporation ، قسم الدفاع الجوي الأمريكي. شركة الناتو للأنظمة الإلكترونية Raytheon ، شركة Hughes Missile Systems ، الولايات المتحدة الأمريكية Lockheed Martin Aeronutronic
من كتاب الغواصات السوفيتية التي تعمل بالديزل والكهرباء لبناء ما بعد الحرب مؤلف جاجين فلاديمير فلاديميروفيتشالتركيب وماين TTX "METEL" "RASTRUB-B" "VODOPAD" "MEDVEDKA" ASROC CY-1 MILAS مطور الدولة روسيا "Raduga" روسيا "المبتكر" الروسي "Morteplotekhni-ka" الولايات المتحدة الأمريكية أنظمة الدفاع التكتيكي لوكهيد مارتن الصين CMTIEC فرنسا GIE Milas
من كتاب أسلحة الصواريخ المحلية مؤلف برفوف ميخائيل أندريفيتشبعض جوانب معركة مكافحة السوبجار خضعت القوات البحرية لتغييرات نوعية أساسية بعد الحرب العالمية الثانية. تطورت الغواصات من الغوص إلى الغواصات الحقيقية والاستقلالية والعمق والسرعة والمدى
من كتاب الأنظمة المحلية المضادة للدبابات مؤلف أنجيلسكي روستيسلاف دميترييفيتشأنظمة الصواريخ الأرضية المضادة للسرطان R-101R -101 (R-102) صاروخ موجه مضاد للطائرات. مجهزة بـ LRE. تم تطويره في النصف الثاني من الأربعينيات. في NII-88 على أساس الصاروخ الألماني المضاد للطائرات "Wasserfall". أجريت الاختبارات في عام 1948. كبير المصممين - يوجين
من كتاب السيارات السرية للجيش السوفيتي مؤلف كوتشنيف يفغيني دميترييفيتشمركبات الصواريخ البحرية المضادة للطائرات V-753 "فولهوف" M-2. نظام صاروخ V-753 (13DM) M-2 التجريبي البحري المضاد للطائرات مع صاروخ موجه من مرحلتين ومجهز بمحرك صاروخي يعمل بالوقود السائل ومحرك إطلاق صاروخي يعمل بالوقود الصلب. تم إنشاؤه على أساس نظام الدفاع الجوي الأرضي S-75. مطور معقد - TsKB
من كتاب الطيران في الحروب المحلية المؤلف Babich V. K.أنظمة الصواريخ المضادة للطائرات المحمولة Igla (الصورة من مجلة Military Parade) Strela-2 Strela-2M Strela-2 9K32. نظام الصواريخ المحمولة 9M32 المضاد للطائرات 9K32 بصاروخ موجه صغير الحجم يعمل بالوقود الصلب. أول نظام دفاع جوي محلي محمول. مصمم
من كتاب DIY الإلكترونية المؤلف كاشكاروف أ.المجمعات المضادة للصواريخ أ. V-1000 نظام دفاع تجريبي (مضلع) مضاد للصواريخ "A" مع صواريخ V-1000 المضادة للصواريخ. أولا النظام المحليطليعة. تم نشره في ملعب تدريب ساري شجان. ضمنت هزيمة صاروخ باليستي متوسط المدى أحادي الكتلة.
من كتاب العصر المعدني مؤلف نيكولاييف غريغوري إيليتشالمجمعات المضادة للدبابات من الجيل الثاني "Fagot" مجمع "Malyutka" المضاد للدبابات الذي بدأ العمل به في عام 1963 لبى بشكل أساسي متطلبات القوات وثبت فيما بعد أنه سلاح فعال في سياق الحروب المحلية. ومع ذلك ، و
من كتاب تطور الأنظمة المضادة للغواصات للسفن المحلية المؤلف كاريكين ليونيدأنظمة الصواريخ المضادة للدبابات في التسعينيات في منتصف الثمانينيات ، جنبًا إلى جنب مع العمل على تحديث الأنظمة المضادة للدبابات التي تم إنشاؤها سابقًا ، كانت تهدف بشكل أساسي
من كتاب المؤلفأنظمة الصواريخ والمدفعية المتنقلة تم إنشاء أول قاذفة Br-264 للتركيب على هيكل السيارة في مكتب التصميم بمصنع Barrikady في سبتمبر 1961 وكانت جزءًا من OTRK 9K71 Temp التجريبي مع صاروخ 9M71 يعمل بالوقود الصلب ، والذي تم تطويره مع
من كتاب المؤلف3. في الكفاح من أجل البقاء في الحروب المحلية ، كما لوحظ ، كان الخبراء الأجانب يقدرون البقاء على قيد الحياة من حيث مستوى الخسائر - نسبة عدد الطائرات التي تم إسقاطها إلى عدد الطلعات الجوية التي تم إجراؤها. على سبيل المثال ، معدل الخسائر في سرب تكتيكي ،
من كتاب المؤلف4.8.2. تقنيات إخماد التداخل الفعال من الأفضل إدارة ضوضاء خط الطاقة من خلال الجمع بين مرشحات ومكثفات التردد الراديوي الخطية العابرينفي النسق التيار المتناوب. يمكن أن تحقق هذه الطريقة توهينًا للتداخل بمقدار 60 dB عند ترددات تصل إلى
من كتاب المؤلفالفصل 1. في الحرب ضد التآكل شاطئ المعادن لا يوجد شيء أبدي في العالم - لقد عرف الجميع هذه الحقيقة البسيطة لفترة طويلة. ما يبدو أنه لا يتزعزع إلى الأبد - الجبال ، كتل الجرانيت ، قارات بأكملها - في نهاية المطاف تنهار ، وتنهار في الغبار ، وتغرق تحت الماء ، وتسقط في الأعماق.
من كتاب المؤلفأنظمة الصواريخ المضادة للغواصات كما ذكرنا سابقًا ، مع ظهور الغواصات النووية في الخمسينيات من القرن الماضي ، كانت هناك حاجة إلى أنظمة أسلحة جديدة يمكنها ضرب أهداف تحت الماء على مسافة بعيدة. في الاتحاد السوفياتي ، بدأ العمل في هذا الاتجاه وفقًا لـ
مبادئ بناء مجمعات وأنظمة السونار النشط الموضوع: الأسئلة: 1) مبادئ بناء السونار النشط 2) مبادئ بناء الاتصال بالسونار وتحديد الهوية 3) مبادئ بناء الكشف عن الألغام بالسونار الهدف التعليمي: 1. دراسة مبادئ بناء السونار النشط 2) • دراسة مبادئ العمل على المخططات الهيكلية للغاز النشط الثاني. الهدف التربوي 1. تفعيل النشاط المعرفي للطلاب. 2. تكوين المهارات القيادية والمنهجية (KMN) ومهارات العمل التربوي (NVR) بين الطلاب. واحد
 الأدب: 1. معايير الدولةاتحاد الجمهوريات الاشتراكية السوفياتية و RF. GOST 2. نظام واحدوثائق التصميم (ESKD) 3. Yu. A. Koryakin، S. A. Smirnov، G. V. Yakovlev. التكنولوجيا الصوتية المائية المحمولة على متن السفن: الحالة و مشاكل فعلية. - سان بطرسبرج. : Nauka ، 2004. - 410 ص. 177 م. 4. في سولوفييف ، جي إن كورولكوف ، إيه إيه بارانينكو ، وآخرون ، الإلكترونيات الراديوية البحرية: كتيب. - سان بطرسبرج. : البوليتكنك ، 2003. - 246 ص. : سوف. 5. G. I. Kazantsev، G.G Kotov، V.B Lokshin، et al. Hydroacoustics Textbook. - م: فون. الناشر 1993. 230 ص. سوف. 2
الأدب: 1. معايير الدولةاتحاد الجمهوريات الاشتراكية السوفياتية و RF. GOST 2. نظام واحدوثائق التصميم (ESKD) 3. Yu. A. Koryakin، S. A. Smirnov، G. V. Yakovlev. التكنولوجيا الصوتية المائية المحمولة على متن السفن: الحالة و مشاكل فعلية. - سان بطرسبرج. : Nauka ، 2004. - 410 ص. 177 م. 4. في سولوفييف ، جي إن كورولكوف ، إيه إيه بارانينكو ، وآخرون ، الإلكترونيات الراديوية البحرية: كتيب. - سان بطرسبرج. : البوليتكنك ، 2003. - 246 ص. : سوف. 5. G. I. Kazantsev، G.G Kotov، V.B Lokshin، et al. Hydroacoustics Textbook. - م: فون. الناشر 1993. 230 ص. سوف. 2
 اعتمادًا على طريقة الحصول على المعلومات الصوتية المائية (وفقًا لطريقة استخدام الطاقة) ، يتم تقسيم الأنظمة المائية الصوتية إلى أنظمة صوتية مائية نشطة أ) الأنظمة المائية الصوتية السلبية المنعكسة أو المشعة من الأجسام تحت الماء والأجسام السطحية. الشروط المكافئة نشطة نظام صوتي مائي- السونار النشط أو تحديد اتجاه الصدى أو موقع الصدى أو السونار فقط).
اعتمادًا على طريقة الحصول على المعلومات الصوتية المائية (وفقًا لطريقة استخدام الطاقة) ، يتم تقسيم الأنظمة المائية الصوتية إلى أنظمة صوتية مائية نشطة أ) الأنظمة المائية الصوتية السلبية المنعكسة أو المشعة من الأجسام تحت الماء والأجسام السطحية. الشروط المكافئة نشطة نظام صوتي مائي- السونار النشط أو تحديد اتجاه الصدى أو موقع الصدى أو السونار فقط).
 السونار النشط هو طريقة لاكتشاف وتحديد خصائص الأجسام الموجودة تحت الماء ، بناءً على انبعاث الإشارات الصوتية المائية في البيئة المائية ، فضلاً عن استقبال ومعالجة إشارات الصدى التي تنشأ نتيجة انعكاس (أو تشتت) الصوت موجات من أجسام تحت الماء. الوسائل المائية الصوتية (الأنظمة) التي توفر السونار النشط تسمى السونار ومحطات السونار (SLS) أو السونار (HL) وإيجاد اتجاه الصدى (ED) وقياس المسافة (ID) لـ SJSC. عادة ، يُفهم GLS على أنه أنظمة مصممة لاكتشاف وقياس المسافة إلى الغواصات والأشياء المهمة الأخرى تحت الماء.
السونار النشط هو طريقة لاكتشاف وتحديد خصائص الأجسام الموجودة تحت الماء ، بناءً على انبعاث الإشارات الصوتية المائية في البيئة المائية ، فضلاً عن استقبال ومعالجة إشارات الصدى التي تنشأ نتيجة انعكاس (أو تشتت) الصوت موجات من أجسام تحت الماء. الوسائل المائية الصوتية (الأنظمة) التي توفر السونار النشط تسمى السونار ومحطات السونار (SLS) أو السونار (HL) وإيجاد اتجاه الصدى (ED) وقياس المسافة (ID) لـ SJSC. عادة ، يُفهم GLS على أنه أنظمة مصممة لاكتشاف وقياس المسافة إلى الغواصات والأشياء المهمة الأخرى تحت الماء.

 مخطط يعكس مبدأ اكتشاف وتحديد المسافة إلى الهدف استقبال إشارة h / a المنعكسة إشعاع h / a إشارة D \ u003d st / 2 انعكاس إشارة h / a
مخطط يعكس مبدأ اكتشاف وتحديد المسافة إلى الهدف استقبال إشارة h / a المنعكسة إشعاع h / a إشارة D \ u003d st / 2 انعكاس إشارة h / a
 د مسار الإرسال (جهاز المولد) أ نبضة الزناد أنظمة عرض المعلومات أنظمة المزامنة نبضة الزناد ب ج نظام إمداد الطاقة أ ب ج د الاستقبال الانبعاث هوائي صوتي
د مسار الإرسال (جهاز المولد) أ نبضة الزناد أنظمة عرض المعلومات أنظمة المزامنة نبضة الزناد ب ج نظام إمداد الطاقة أ ب ج د الاستقبال الانبعاث هوائي صوتي

 تم تصميم الهوائي الصوتي (AA) لتحويل الطاقة الكهربائية إلى طاقة صوتية والعكس صحيح. تُستخدم أجهزة الإدخال لتضخيم الإشارات المستقبلة مسبقًا ، وكذلك لتبديل الهوائي الصوتي بالمولد والمستقبل. يولد جهاز المولد نبضات إشعاعية بواسطة معلمات معينة. تحل القنوات المستقبلة لمسار الكشف مشاكل اكتشاف الأجسام تحت الماء وتحديد إحداثياتها تقريبًا. تنسيق قنوات الصقل مخصصة لـ التعريف الدقيقإحداثيات الأجسام تحت الماء مع إصدارها اللاحق لأنظمة التحكم في الأسلحة.
تم تصميم الهوائي الصوتي (AA) لتحويل الطاقة الكهربائية إلى طاقة صوتية والعكس صحيح. تُستخدم أجهزة الإدخال لتضخيم الإشارات المستقبلة مسبقًا ، وكذلك لتبديل الهوائي الصوتي بالمولد والمستقبل. يولد جهاز المولد نبضات إشعاعية بواسطة معلمات معينة. تحل القنوات المستقبلة لمسار الكشف مشاكل اكتشاف الأجسام تحت الماء وتحديد إحداثياتها تقريبًا. تنسيق قنوات الصقل مخصصة لـ التعريف الدقيقإحداثيات الأجسام تحت الماء مع إصدارها اللاحق لأنظمة التحكم في الأسلحة.
 تسمح أنظمة تتبع الهدف شبه الأوتوماتيكية بتتبع الأهداف في وضع شبه تلقائي مع الإزالة التلقائية للإحداثيات الحالية. تتيح قناة الاستماع الاستماع إلى الإشارات المستقبلة عن طريق الأذن لتصنيف التلامس الصوتي المائي مع الهدف. نظام الإشارة هو جهاز إخراج وهو ضروري للعرض المرئي للمعلومات الواردة وإزالة البيانات حول الهدف. نظام التحكم والمزامنة هو الرابط بين جميع أجهزة وأنظمة SFS.
تسمح أنظمة تتبع الهدف شبه الأوتوماتيكية بتتبع الأهداف في وضع شبه تلقائي مع الإزالة التلقائية للإحداثيات الحالية. تتيح قناة الاستماع الاستماع إلى الإشارات المستقبلة عن طريق الأذن لتصنيف التلامس الصوتي المائي مع الهدف. نظام الإشارة هو جهاز إخراج وهو ضروري للعرض المرئي للمعلومات الواردة وإزالة البيانات حول الهدف. نظام التحكم والمزامنة هو الرابط بين جميع أجهزة وأنظمة SFS.
 تم تصميم جهاز التدريب المدمج (VUTU) لتطوير مهارات المشغل لهدف محاكى ، بالإضافة إلى القدرة على التحكم في FLS في أوضاع مختلفة. يسمح لك نظام التحكم الآلي المدمج (VSAC) بالتحكم في المعلمات التقنية الرئيسية لـ FLS ، لتحديد أعطالها. يتم تشغيل FLS من خلال توفير الجهد لجميع الأجهزة ؛ ولهذا ، تحتوي المحطة على لوحة مفاتيح ، تُعرض عليها عناصر التحكم في نظام إمداد الطاقة
تم تصميم جهاز التدريب المدمج (VUTU) لتطوير مهارات المشغل لهدف محاكى ، بالإضافة إلى القدرة على التحكم في FLS في أوضاع مختلفة. يسمح لك نظام التحكم الآلي المدمج (VSAC) بالتحكم في المعلمات التقنية الرئيسية لـ FLS ، لتحديد أعطالها. يتم تشغيل FLS من خلال توفير الجهد لجميع الأجهزة ؛ ولهذا ، تحتوي المحطة على لوحة مفاتيح ، تُعرض عليها عناصر التحكم في نظام إمداد الطاقة
 وفقًا لطريقة مسح مساحة المياه للعرض الشامل (SR) عرض القطاع 360 (SO) 25 0 عرض خطوة بخطوة (SHO) 0 360 عرض قطاعي خطوة بخطوة (SSW) 0 120 А А А 0 А А 120 0120 А А 120 0 0
وفقًا لطريقة مسح مساحة المياه للعرض الشامل (SR) عرض القطاع 360 (SO) 25 0 عرض خطوة بخطوة (SHO) 0 360 عرض قطاعي خطوة بخطوة (SSW) 0 120 А А А 0 А А 120 0120 А А 120 0 0


 أرز. الشكل 4. منظر للمؤشر مع مسح حلزوني. الشكل 9. عرض علامات من الأهداف على المؤشر مع مسح الخط. الشكل 5. منظر للمؤشر مع مسح أفقي. 10. عرض المؤشر مع مقاييس الاتجاه والمسافة
أرز. الشكل 4. منظر للمؤشر مع مسح حلزوني. الشكل 9. عرض علامات من الأهداف على المؤشر مع مسح الخط. الشكل 5. منظر للمؤشر مع مسح أفقي. 10. عرض المؤشر مع مقاييس الاتجاه والمسافة



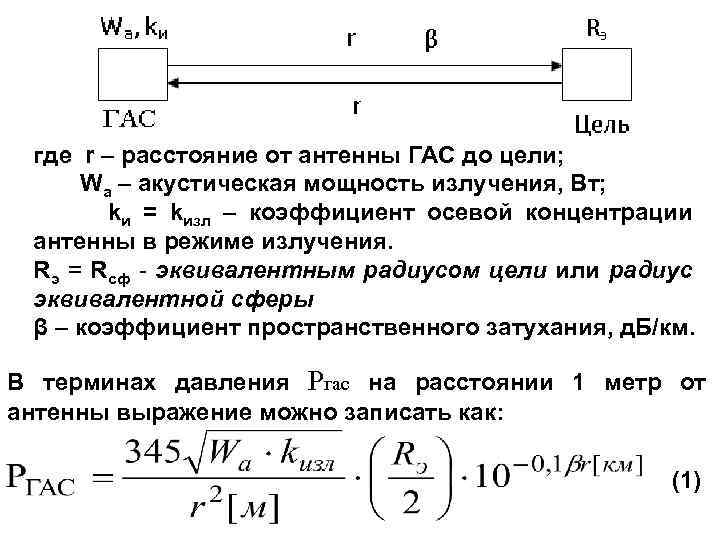 حيث r هي المسافة من هوائي GAS إلى الهدف ؛ وا هي قوة الإشعاع الصوتي ، W ؛ ki = kind هو معامل التركيز المحوري للهوائي في وضع الإشعاع. Re = Rsph - نصف القطر المكافئ للهدف أو نصف قطر الكرة المكافئة β - معامل التوهين المكاني d. B / km. من حيث الضغط Рgas على مسافة 1 متر من الهوائي ، يمكن كتابة التعبير على النحو التالي: (1)
حيث r هي المسافة من هوائي GAS إلى الهدف ؛ وا هي قوة الإشعاع الصوتي ، W ؛ ki = kind هو معامل التركيز المحوري للهوائي في وضع الإشعاع. Re = Rsph - نصف القطر المكافئ للهدف أو نصف قطر الكرة المكافئة β - معامل التوهين المكاني d. B / km. من حيث الضغط Рgas على مسافة 1 متر من الهوائي ، يمكن كتابة التعبير على النحو التالي: (1)
 لنحدد مستوى إشارة الصدى من الهدف بالنسبة إلى مستوى الصفر Р 0 ، باستخدام العلاقة (1) واللوغاريتم مع خوارزمية عشرية: - مستوى الإشعاع بالديسيبل ؛ - يتم التعبير عن هذه القيمة بالديسيبل وتميز انعكاسية الكائن.
لنحدد مستوى إشارة الصدى من الهدف بالنسبة إلى مستوى الصفر Р 0 ، باستخدام العلاقة (1) واللوغاريتم مع خوارزمية عشرية: - مستوى الإشعاع بالديسيبل ؛ - يتم التعبير عن هذه القيمة بالديسيبل وتميز انعكاسية الكائن.
 PR - خسارة الانتشار القياسية ، بالديسيبل ، مع مراعاة توهين الإشارة أثناء انتشارها من هوائي GAS إلى الهدف والعكس ، مع مراعاة قانون الانتشار الكروي. مع الأخذ في الاعتبار الترميز المقدم ، سيأخذ التعبير الشكل: NGAS = MI + SC - 2 PR (2) تستخدم الصيغة (2) لتقدير مستوى إشارة الصدى من الهدف عند نقطة الاستقبال في لانهائي متجانس بيئة دون تدخل.
PR - خسارة الانتشار القياسية ، بالديسيبل ، مع مراعاة توهين الإشارة أثناء انتشارها من هوائي GAS إلى الهدف والعكس ، مع مراعاة قانون الانتشار الكروي. مع الأخذ في الاعتبار الترميز المقدم ، سيأخذ التعبير الشكل: NGAS = MI + SC - 2 PR (2) تستخدم الصيغة (2) لتقدير مستوى إشارة الصدى من الهدف عند نقطة الاستقبال في لانهائي متجانس بيئة دون تدخل.
 مع الأخذ في الاعتبار معالجة الإشارة المفيدة Рgas = Рc والتداخل Рp في الغاز ، ومع مراعاة معامل التعرف δ ، يمكننا كتابة التعبير التالي Рgas = Рc = δ Рp Δf هو نطاق التردد (المدى) لمسير استقبال الغاز ، هرتز ؛ f 0 - متوسط تردد النطاق ، k. هرتز ؛ β = 0.036 و 03/2 [ج. Hz] هو معامل التوهين المكاني d. B / km.
مع الأخذ في الاعتبار معالجة الإشارة المفيدة Рgas = Рc والتداخل Рp في الغاز ، ومع مراعاة معامل التعرف δ ، يمكننا كتابة التعبير التالي Рgas = Рc = δ Рp Δf هو نطاق التردد (المدى) لمسير استقبال الغاز ، هرتز ؛ f 0 - متوسط تردد النطاق ، k. هرتز ؛ β = 0.036 و 03/2 [ج. Hz] هو معامل التوهين المكاني d. B / km.
 GAS ON PN Antenna GAS UI PR SC UP Target TX D يمكن كتابة معادلة المدى لوضع GL (EP) في شكل رمزي (مع مراعاة علامة "-") على النحو التالي: EP = - (UI + SC - UP - PO + PN) = 2 PR EP \ u003d UE (مستوى التداخل) \ u003d
GAS ON PN Antenna GAS UI PR SC UP Target TX D يمكن كتابة معادلة المدى لوضع GL (EP) في شكل رمزي (مع مراعاة علامة "-") على النحو التالي: EP = - (UI + SC - UP - PO + PN) = 2 PR EP \ u003d UE (مستوى التداخل) \ u003d
 PO (عتبة الكشف) = PN (مؤشر الاتجاهية) = الغاز النشط يشمل: - قياس المسافة بالغاز - غاز الاتصالات - تحديد الغاز - الكشف عن الألغام - اكتشاف الطوربيد - غاز اكتشاف الغواص والغازات المضادة للتخريب - إضاءة الجليد واكتشاف الغاز - السجلات المائية الصوتية - منظر جانبي للغاز
PO (عتبة الكشف) = PN (مؤشر الاتجاهية) = الغاز النشط يشمل: - قياس المسافة بالغاز - غاز الاتصالات - تحديد الغاز - الكشف عن الألغام - اكتشاف الطوربيد - غاز اكتشاف الغواص والغازات المضادة للتخريب - إضاءة الجليد واكتشاف الغاز - السجلات المائية الصوتية - منظر جانبي للغاز

 يتكون التسلح الصوتي المائي لـ NK من: ØGAK MGK-335 "البلاتين" - مجمع الكشف الصوتي المائي وتعيين الهدف والاتصالات ؛ Ø GAK MGK-345 "برونزي" - مجمع صوتي مائي للكشف وتعيين الهدف والاتصالات ؛ Ø GAK MGK-355 "Polynom" - نظام سونار لاكتشاف الغواصات وإصدار التعيين المستهدف للأسلحة المضادة للغواصات ؛ ØGAS MG-332 "Argun" ، GAS MG-332 T "Argun-T" - محطة كشف السونار وتحديد الهدف للسفن المضادة للغواصات ؛ ØGAS MG-329 "Oka" ، GAS MG-329 M "Oka-M" - محطة خفض الصوت المائي ؛ ØGAS MG-339 "Shelon" أو GAS MG-339 T "Shelon-T" - محطة مائية صوتية للكشف وتحديد المواقع والاتصال وتحديد الهوية ؛
يتكون التسلح الصوتي المائي لـ NK من: ØGAK MGK-335 "البلاتين" - مجمع الكشف الصوتي المائي وتعيين الهدف والاتصالات ؛ Ø GAK MGK-345 "برونزي" - مجمع صوتي مائي للكشف وتعيين الهدف والاتصالات ؛ Ø GAK MGK-355 "Polynom" - نظام سونار لاكتشاف الغواصات وإصدار التعيين المستهدف للأسلحة المضادة للغواصات ؛ ØGAS MG-332 "Argun" ، GAS MG-332 T "Argun-T" - محطة كشف السونار وتحديد الهدف للسفن المضادة للغواصات ؛ ØGAS MG-329 "Oka" ، GAS MG-329 M "Oka-M" - محطة خفض الصوت المائي ؛ ØGAS MG-339 "Shelon" أو GAS MG-339 T "Shelon-T" - محطة مائية صوتية للكشف وتحديد المواقع والاتصال وتحديد الهوية ؛
 ØGAS MG-79 أو GAS MG-89 "Serna" - محطة صوتية مائية للكشف عن مناجم المرساة والقاع ؛ ØGAS MG-7 "سوار" و GAS MG-737 "Amulet-3" - محطة كشف السونار لقوى ووسائل التخريب تحت الماء ؛ ØGAS MG-26 "Khosta" أو GAS MG-45 "Backgammon" - معدات للاتصال والتعرف الصوتي المائي. ØGAS KMG-12 "Kassandra" - معدات التصنيف المستهدفة للمحطات المائية الصوتية للسفن السطحية أثناء تشغيلها في الوضع النشط. ØGAS MG-409 C - نظام الكشف السلبي لعوامات السونار. ØGAS "Altyn" - معدات لقياس التوزيع الرأسي لسرعة الصوت في الماء من سفينة سطحية ؛ ØGAS MI-110 KM - معدات للكشف عن أعقاب الطائرة.
ØGAS MG-79 أو GAS MG-89 "Serna" - محطة صوتية مائية للكشف عن مناجم المرساة والقاع ؛ ØGAS MG-7 "سوار" و GAS MG-737 "Amulet-3" - محطة كشف السونار لقوى ووسائل التخريب تحت الماء ؛ ØGAS MG-26 "Khosta" أو GAS MG-45 "Backgammon" - معدات للاتصال والتعرف الصوتي المائي. ØGAS KMG-12 "Kassandra" - معدات التصنيف المستهدفة للمحطات المائية الصوتية للسفن السطحية أثناء تشغيلها في الوضع النشط. ØGAS MG-409 C - نظام الكشف السلبي لعوامات السونار. ØGAS "Altyn" - معدات لقياس التوزيع الرأسي لسرعة الصوت في الماء من سفينة سطحية ؛ ØGAS MI-110 KM - معدات للكشف عن أعقاب الطائرة.
 أرز. 1. مشروع طراد الصواريخ 1164 مشروع 1164 مسلح بأسلحة مائية صوتية: q GAK MGK-335 Platinum ؛ q GAS MG-7 "سوار" - مجموعتان ؛ q GAS MG-737 "تميمة -3" ؛ ف غاز KMG-12 "كاساندرا". ما يلي
أرز. 1. مشروع طراد الصواريخ 1164 مشروع 1164 مسلح بأسلحة مائية صوتية: q GAK MGK-335 Platinum ؛ q GAS MG-7 "سوار" - مجموعتان ؛ q GAS MG-737 "تميمة -3" ؛ ف غاز KMG-12 "كاساندرا". ما يلي
 أرز. 2. سفينة كبيرة مضادة للغواصات من المشروع 1155 (1155. 1) المشروع 1155 مسلحة بأسلحة السونار التالية: GAK MGK-335 Platinum؛ GAS MG-7 "سوار" - مجموعتان ؛ غاز "التين" ؛ الغاز MI-110 KM. المشروع 1155.1 مزود بتسلح السونار التالي: GAK MGK-355 "Polynom" ؛ GAS MG-7 "سوار" - مجموعتان ؛ غاز "التين" ؛ الغاز MI-110 KM.
أرز. 2. سفينة كبيرة مضادة للغواصات من المشروع 1155 (1155. 1) المشروع 1155 مسلحة بأسلحة السونار التالية: GAK MGK-335 Platinum؛ GAS MG-7 "سوار" - مجموعتان ؛ غاز "التين" ؛ الغاز MI-110 KM. المشروع 1155.1 مزود بتسلح السونار التالي: GAK MGK-355 "Polynom" ؛ GAS MG-7 "سوار" - مجموعتان ؛ غاز "التين" ؛ الغاز MI-110 KM.
 أرز. 3. مشروع 956 سفينة صواريخ وسفينة مدفعية فئة فرعية مدمرة. مشروع 956 من المرتبة الأولى مسلح بالأسلحة المائية الصوتية التالية: GAK MGK-355 "Polynom" ؛ GAS MG-7 "سوار" - مجموعتان ؛ غاز KMG-12 "كاساندرا".
أرز. 3. مشروع 956 سفينة صواريخ وسفينة مدفعية فئة فرعية مدمرة. مشروع 956 من المرتبة الأولى مسلح بالأسلحة المائية الصوتية التالية: GAK MGK-355 "Polynom" ؛ GAS MG-7 "سوار" - مجموعتان ؛ غاز KMG-12 "كاساندرا".
 أرز. 4. القارب الصاروخي للمشروع 1241. 2 المشروع 1241. 2 مسلح بأسلحة السونار التالية: GAK MGK-345 "برونزي" ؛ GAS MG-45 "لعبة الطاولة" ؛
أرز. 4. القارب الصاروخي للمشروع 1241. 2 المشروع 1241. 2 مسلح بأسلحة السونار التالية: GAK MGK-345 "برونزي" ؛ GAS MG-45 "لعبة الطاولة" ؛
 أرز. 5. مشروع زورق طوربيد 1241 مشروع 1241 مسلح بأسلحة السونار التالية: SJSC MGK-345 Bronze؛ GAS MG-45 "لعبة الطاولة" ؛
أرز. 5. مشروع زورق طوربيد 1241 مشروع 1241 مسلح بأسلحة السونار التالية: SJSC MGK-345 Bronze؛ GAS MG-45 "لعبة الطاولة" ؛
 أرز. 6. مشروع 1124 السفينة الصغيرة المضادة للغواصات المشروع 1124 مسلحة بأسلحة السونار التالية: GAS MG-339 Shelon أو GAS MG-339 T Shelon-T ؛ بعض المشاريع مسلحة بـ SJSC MGK-335 Platinum ؛ GAS MG-322 "Argun" أو GAS MG-322 T "Argun-T" ؛ GAS MG-329 "Oka" أو GAS MG-329 M "Oka-M" ؛ GAS MG-26 "Khosta" أو GAS MG-45 "لعبة الطاولة" ؛ غاز KMG-12 "كاساندرا". الغاز MG-409 S.
أرز. 6. مشروع 1124 السفينة الصغيرة المضادة للغواصات المشروع 1124 مسلحة بأسلحة السونار التالية: GAS MG-339 Shelon أو GAS MG-339 T Shelon-T ؛ بعض المشاريع مسلحة بـ SJSC MGK-335 Platinum ؛ GAS MG-322 "Argun" أو GAS MG-322 T "Argun-T" ؛ GAS MG-329 "Oka" أو GAS MG-329 M "Oka-M" ؛ GAS MG-26 "Khosta" أو GAS MG-45 "لعبة الطاولة" ؛ غاز KMG-12 "كاساندرا". الغاز MG-409 S.
 أرز. 7. المشروع 1265 المشروع 1265 كاسحة ألغام قاعدة (رقم 260 ، 270) المشروع 1265 مسلح بأسلحة السونار التالية: GAS MG-79 أو GAS MG-89 "Serna" ؛ غاز "كبارجا" ؛
أرز. 7. المشروع 1265 المشروع 1265 كاسحة ألغام قاعدة (رقم 260 ، 270) المشروع 1265 مسلح بأسلحة السونار التالية: GAS MG-79 أو GAS MG-89 "Serna" ؛ غاز "كبارجا" ؛
 أرز. 8. مشروع 775 سفينة الإنزال الكبيرة BDK Project 775 مسلحة بأسلحة السونار التالية: GAS MG-7 "Bracelet" ؛ GAS MG-26 "Khosta" أو GAS MG-45 "لعبة الطاولة".
أرز. 8. مشروع 775 سفينة الإنزال الكبيرة BDK Project 775 مسلحة بأسلحة السونار التالية: GAS MG-7 "Bracelet" ؛ GAS MG-26 "Khosta" أو GAS MG-45 "لعبة الطاولة".
 المحطات المائية الصوتية "Tamir-11" (1953) GAS للسفن السطحية ذات الإزاحة الصغيرة إجمالي عدد الأجهزة - 17 وزن الأجهزة - 1000 كجم كبير المصممين VOVNOBOY B.N.
المحطات المائية الصوتية "Tamir-11" (1953) GAS للسفن السطحية ذات الإزاحة الصغيرة إجمالي عدد الأجهزة - 17 وزن الأجهزة - 1000 كجم كبير المصممين VOVNOBOY B.N.
 المحطات المائية الصوتية "Hercules" (1957) GAS للسفن السطحية ذات الإزاحة المتوسطة والكبيرة العدد الإجمالي للأجهزة - 30 وزن الأجهزة - 5800 كجم كبير المصممين Z.N UMIKOV
المحطات المائية الصوتية "Hercules" (1957) GAS للسفن السطحية ذات الإزاحة المتوسطة والكبيرة العدد الإجمالي للأجهزة - 30 وزن الأجهزة - 5800 كجم كبير المصممين Z.N UMIKOV
 المحطات المائية الصوتية "Mezen-2" (1963) GAS للكشف عن الألغام السفلية إجمالي عدد الأجهزة وزن الأجهزة - 12 - 2100 كجم كبير المصممين NIZENKO I.I.
المحطات المائية الصوتية "Mezen-2" (1963) GAS للكشف عن الألغام السفلية إجمالي عدد الأجهزة وزن الأجهزة - 12 - 2100 كجم كبير المصممين NIZENKO I.I.
 المحطات المائية الصوتية "كاشالوت" (1963) غاز للبحث عن السفن الغارقة إجمالي عدد الأجهزة - 22 وزن الأجهزة - 4000 كجم (بدون قطع غيار) رئيس المصممين N. A. TIMOKHOV
المحطات المائية الصوتية "كاشالوت" (1963) غاز للبحث عن السفن الغارقة إجمالي عدد الأجهزة - 22 وزن الأجهزة - 4000 كجم (بدون قطع غيار) رئيس المصممين N. A. TIMOKHOV
 المجمعات المائية الصوتية "روبن" (1964) SAC للغواصات النووية متعددة الأغراض كبير المصممين ALADISHKIN E. I. إجمالي عدد الأجهزة - 56 وزن الأجهزة - 54747 كجم
المجمعات المائية الصوتية "روبن" (1964) SAC للغواصات النووية متعددة الأغراض كبير المصممين ALADISHKIN E. I. إجمالي عدد الأجهزة - 56 وزن الأجهزة - 54747 كجم
 المحطات المائية الصوتية "Titan-2" (1966) GAS للسفن الكبيرة المضادة للغواصات إجمالي عدد الأدوات وزن الأدوات - 37-16000 كجم كبير المصممين G.M.
المحطات المائية الصوتية "Titan-2" (1966) GAS للسفن الكبيرة المضادة للغواصات إجمالي عدد الأدوات وزن الأدوات - 37-16000 كجم كبير المصممين G.M.
 المحطات المائية الصوتية "Argun" (1967) GAS للسفن الصغيرة المضادة للغواصات إجمالي عدد الأجهزة كتلة الأدوات - 30-7600 كجم مع قطع الغيار والملحقات كبير المصممين V. P. IVANCHENKO
المحطات المائية الصوتية "Argun" (1967) GAS للسفن الصغيرة المضادة للغواصات إجمالي عدد الأجهزة كتلة الأدوات - 30-7600 كجم مع قطع الغيار والملحقات كبير المصممين V. P. IVANCHENKO
 المحطات المائية الصوتية "سيرنا" (1969) غاز للكشف عن مناجم المرساة والسفلى إجمالي عدد الأجهزة وزن الأجهزة - 20 - 3900 كجم كبير المصممين G. G. LYASHENKO
المحطات المائية الصوتية "سيرنا" (1969) غاز للكشف عن مناجم المرساة والسفلى إجمالي عدد الأجهزة وزن الأجهزة - 20 - 3900 كجم كبير المصممين G. G. LYASHENKO
 المحطات المائية الصوتية "BUK" (1971) GAS لسفن الأبحاث إجمالي عدد الأدوات وزن الأدوات - 30-11000 كجم كبير المصممين KLIMENKO ZH.P.
المحطات المائية الصوتية "BUK" (1971) GAS لسفن الأبحاث إجمالي عدد الأدوات وزن الأدوات - 30-11000 كجم كبير المصممين KLIMENKO ZH.P.
 المجمعات المائية الصوتية "بلاتينيوم" (1972) SAC للسفن السطحية ذات الإزاحة المتوسطة والكبيرة كبير المصممين L. D. KLIMOVITSKY عدد الأدوات - 64 وزن الأجهزة - 23 طنًا
المجمعات المائية الصوتية "بلاتينيوم" (1972) SAC للسفن السطحية ذات الإزاحة المتوسطة والكبيرة كبير المصممين L. D. KLIMOVITSKY عدد الأدوات - 64 وزن الأجهزة - 23 طنًا
 المجمعات المائية الصوتية "Polynom" (1979) HAK للإزاحة الكبيرة NK كبير المصممين V.G SOLOVIEV إجمالي عدد الأجهزة - 152 وزن الأجهزة - 72000
المجمعات المائية الصوتية "Polynom" (1979) HAK للإزاحة الكبيرة NK كبير المصممين V.G SOLOVIEV إجمالي عدد الأجهزة - 152 وزن الأجهزة - 72000
 المجمعات المائية الصوتية "Zvezda-M 1" (1986) سونار رقمي لـ NK للإزاحة المتوسطة كبير المصممين Aleshchenko O.M إجمالي عدد الأجهزة - 64 وزن الأجهزة - 23000 كجم
المجمعات المائية الصوتية "Zvezda-M 1" (1986) سونار رقمي لـ NK للإزاحة المتوسطة كبير المصممين Aleshchenko O.M إجمالي عدد الأجهزة - 64 وزن الأجهزة - 23000 كجم
 المجمعات المائية الصوتية "كابارجا" (1987) سونار الكشف عن الألغام لكاسحات الألغام البحرية والقاعدة والطرق إجمالي عدد الأجهزة - 42 وزن الأجهزة - 8500 كجم كبير المصممين G. G. LYASHENKO
المجمعات المائية الصوتية "كابارجا" (1987) سونار الكشف عن الألغام لكاسحات الألغام البحرية والقاعدة والطرق إجمالي عدد الأجهزة - 42 وزن الأجهزة - 8500 كجم كبير المصممين G. G. LYASHENKO
 الأنظمة المائية الصوتية "Zvezda M 1-01" (1988) سونار رقمي للسفن السطحية ذات الإزاحة الصغيرة كبير المصممين Aleshchenko O.M إجمالي عدد الأجهزة - 60 وزن الأجهزة - 16500 كجم
الأنظمة المائية الصوتية "Zvezda M 1-01" (1988) سونار رقمي للسفن السطحية ذات الإزاحة الصغيرة كبير المصممين Aleshchenko O.M إجمالي عدد الأجهزة - 60 وزن الأجهزة - 16500 كجم
 المجمعات المائية الصوتية "Zvezda-2" (1993) السونار الرقمي للإزاحة العالية NK كبير المصممين Borisenko N. N. إجمالي عدد الأجهزة - 127 وزن الأجهزة - 77742 كجم
المجمعات المائية الصوتية "Zvezda-2" (1993) السونار الرقمي للإزاحة العالية NK كبير المصممين Borisenko N. N. إجمالي عدد الأجهزة - 127 وزن الأجهزة - 77742 كجم

 المجمعات الواعدة مشروع كورفيت 12441 ، والذي ينص على تركيب Zarya-2 SJSC
المجمعات الواعدة مشروع كورفيت 12441 ، والذي ينص على تركيب Zarya-2 SJSC
الفصل 1. تحليل الطرق الأساسية لتحديد مصدر إشارات الملاحة عن طريق أنظمة أساس ULTRASHORT.
1.1 بيان مشكلة تطوير مجمع ملاحي صوتي مائي.
1.1.1. خبرة IPMT في تطوير أنظمة الملاحة الخاصة بجهاز تحديد المدى.
1.1.2. مهام تطوير GANS-UKB.
1.2 طرق الاتساع لتحديد المعلومات goniometric بواسطة هوائيات صغيرة الحجم (خط قاعدي قصير للغاية).
1.2.1. هوائي خطي متساوي البعد.
1.2.2. هوائي دائري متساوي البعد.
1.2.3. الدقة المحتملة لمؤشرات اتجاه السعة.
1.3 حول قياس تحول الطور بين نغمتين مشوهتين بالضوضاء.
1.4 صيغ حساب لإيجاد اتجاه الطور في الأنظمة ذات الهوائيات ذات التكوين البسيط.
1.4.1. جهاز استقبال مزدوج.
1.4.2. أربعة عناصر المتلقي.
1.4.3. مكتشف اتجاه الطور ذو الست قنوات.
1.5 طريقة تحديد اتجاه مصدر إشارات الملاحة باستخدام هوائيات دائرية منفصلة مع عدد كبيرعناصر.
1.5.1. اشتقاق معادلات الحساب وتقدير خطأ مكتشف اتجاه UKB بقاعدة دائرية.
1.5.2. خوارزميات إيجاد الاتجاه لجهاز تحديد الاتجاه بقاعدة دائرية ، مع مراعاة التغيرات في الاتجاه الزاوي للهوائي.
1.6 الاستنتاجات.
الفصل 2. المعالجة الإحصائية لمعلومات نظام ملاحة مائي صوتي بقاعدة أساسية قصيرة للغاية.
2.1. حل مشكلة تحديد الاتجاه بناءً على طرق المعالجة الإحصائية.
2.2. معادلات إيجاد الاتجاه للهوائيات متعددة العناصر ذات التكوينات المختلفة.
2.2.1. هوائي خطي متعدد العناصر.
2.2.2. هوائي مع عدد عشوائي من العناصر على قاعدة دائرية.
2.2.3. هوائي رباعي العناصر.
2.2.4. هوائي دائري مع عنصر إضافي في المنتصف.
2.2.5. هوائي مزدوج.
2.2.6. الاستنتاجات.
2.3 ميزات معالجة إشارة ملاحة متعددة الترددات.
2.4 تكوين الهوائي وتقدير الدقة المحتملة.
2.4.1. الهوائيات مع تباعد نصف موجي بين العناصر.
2.4.2. هوائيات متفرقة.
2.4.3. اختيار القطاع على أساس مراحل الهوائي.
2.5 الاستنتاجات.
الفصل 3. منهجية لتقييم دقة أنظمة الملاحة باستخدام خط أساس قصير للغاية.
3.1 تقييم المكون المنهجي للخطأ في تحديد الاتجاه.
3.1.1. وظيفة المرحلة لهوائي استقبال متعدد العناصر غير كامل.
3.1.2. تطوير معدات لإصدار الشهادات المترولوجية لاستقبال الهوائيات متعددة العناصر.
3.1.3. دراسات تجريبية لدقة الهوائي في ظروف المختبر.
3.2 تقديرات دقة جهاز تحديد اتجاه النطاق العريض (دراسة خصائص الهوائي لمعالجة إشارة ملاحة متعددة الترددات).
3.3 دراسات تجريبية للخصائص الرئيسية للقصر الأساسي نظام ملاحةفي ظروف البحر الضحلة.
3.3.1. طريقة اعتماد النظام عن طريق المقارنة مع بيانات نظام ملاحة معتمد (في مثال GANS-DB).
3.3.2. طريقة لتقدير دقة القياسات الزاوية بناءً على بيانات تحديد النطاق.
3.3.3. طريقة لمعايرة نظام ملاحة أساسي فائق القصر في الظروف الطبيعية باستخدام منارة مرسل مستجيب مرجعي.
3.3.4. الإثبات المترولوجي لمعايرة نظام الملاحة الأساسي فائق القصر وفقًا لبيانات GANS DB و GPS.
3.4. تقدير الخصائص المترولوجية لـ GANS-UKB في ظروف البحار العميقة.
3.5 الاستنتاجات.
الفصل 4. طرق بناء وتطوير العناصر الرئيسية لنظام الاتصالات المائية والصوتية للمركبة تحت الماء. 146 4.1. نهج عام لتقييم المعلمات الرئيسية لـ GASS لـ AUVs.
4.1.1. معلومات عامة.
4.1.2. على هيكل رمز المعلومات.
4.1.3. حول المزامنة.
4.1.4. حول اختيار الدافع لتقدير خصائص قناة الاتصال.
4.1.5. معالجة كتلة البيانات.
4.1.6. النمذجة العددية لقناة الاتصال. 153 4.2.0 تطوير محولات وهوائيات كهرضغطية عريضة النطاق للغاز.
4.2.1. محولات الطاقة الكهروضغطية الأسطوانية ذات النطاق العريض.
4.2.2. محولات الطاقة الكهروضغطية الأسطوانية ذات الخصائص الخاضعة للرقابة
4.2.3. محولات الطاقة الكهربائية الانضغاطية ذات النطاق العريض من نوع المكبس.
4.2.4. حول المطابقة الكهربائية لمحولات الطاقة الكهرضغطية في نطاق تردد واسع.
4.2.5. على كفاءة الطاقة لمحولات النطاق العريض.
4.2.6. خصائص الهوائيات المطورة.
4.3 جهاز استقبال متعدد العناصر لإشارات GASS مع تحكم تكيفي لـ XH وفقًا لمكتشف الاتجاه في نظام الملاحة.
4.3.1. معالجة البيانات.
4.3.2. خصائص هوائي UKB عند استقبال إشارات من نظام الاتصال.
4.4 دراسة تجريبية لنظام اتصالات متعدد الترددات غير متماسك مع تصحيح اتساع خاصية نقل القناة.
4.4.1. خوارزمية معالجة الإشارات متعددة الترددات.
4.4.2. مخطط هيكلينظم الاتصالات.
4.4.3. دراسات تجريبية لعناصر نظام الاتصال الصوتي المائي في ظروف البحر الضحلة.
4.5 الاستنتاجات.
الفصل 5. تطوير سجل دوبلر كجزء من نظام الملاحة على متن المركبة تحت الماء.
5.1 الهوائيات.
5.2 المعالجة الطيفية لإشارات النبضات القصيرة.
5.3 الهيكل والدوائر.
5.4. دراسات ميدانية لخصائص التأخر كجزء من AUV.
5.5 الاستنتاجات.
الفصل 6. التنفيذ الفني والخبرة للتطبيق العملي للإيدز الملاحة المائية السمعية للروبوت تحت الماء. 207 6.1. التنفيذ الفني لنظام ملاحة صوتي مائي مع خط أساس فائق القصر.
6.1.1. مخطط هيكلي لـ GANS-UKB.
6.1.2. ميزات أجهزة البناء.
6.1.3. استقبال هوائي لنظام الملاحة.
6.1.4. معالجة البيانات.
6.1.5. واجهة المستخدم.
6.1.6. برمجة.
6.1.7. اختبارات شاملة وتشغيل عملي لـ GANS-UKB.
6.2. تحديدمجموعة من معدات الغاز.
6.2.1. الخصائص الرئيسية.
6.2.2. مبدأ التشغيل.
6.2.3. رسم تخطيطي لجهاز الاستقبال.
6.2.4. هيكل إشارة الغاز.
6.2.5. نتائج التجارب البحرية في أعماق البحار.
6.3 مجمع الملاحة الصوتية المائية.
6.3.1. تكوين والغرض من مجمع ملاحة السفينة.
6.3.2. مقترحات فنية لتطوير نظام ملاحة وتحكم مشترك.
6.4 اختبار شامل لوسائل الملاحة المائية الصوتية وتجربة استخدامها في العمل الحقيقي.
6.4.1. الاختبار الشامل للمساعدات الملاحية.
6.4.2. خبرة تطبيق عمليتساعد الملاحة الصوتية المائية أثناء عمليات البحث الحقيقية.
قائمة الاطروحات الموصى بها
تطوير طرق وخوارزميات للملاحة أحادية المنارة للمركبات ذاتية القيادة غير المأهولة تحت الماء 2013 ، مرشح العلوم التقنية دوبروفين ، فيدور سيرجيفيتش
طرق معالجة الإشارات الصوتية المائية المتلقاة في منطقة فرينل لأنظمة الاستقبال والبث 2010 ، دكتور في العلوم التقنية كولموغوروف ، فلاديمير ستيبانوفيتش
الاتصالات والملاحة تحت الماء باستخدام المجال الكهرومغناطيسي 2006 دكتور في العلوم التقنية شيبكوف ، أناتولي نيكولايفيتش
طرق وأنظمة تحسين سلامة الملاحة بناءً على أدوات الملاحة الصوتية المائية ذات القاعدة الخطية لأجهزة الاستقبال الاتجاهية 2006 ، دكتور في العلوم التقنية زافيالوف ، فيكتور فالنتينوفيتش
ملاحة مركبة تحت الماء مستقلة باستخدام نظام ملاحة بالقصور الذاتي gimballess 2017 ، مرشح العلوم الفيزيائية والرياضية فيلاتوفا ، جوزيل أميروفنا
أطروحات مماثلة في تخصص "الصوتيات" 01.04.06 كود VAK
تطوير طريقة لتحسين دقة تحديد المواقع للأجسام تحت الماء 2013 ، دكتوراه جولوف ، ألكسندر ألكساندروفيتش
طريقة بارامترية للتحويل المتحكم فيه لمجالات انبعاث الضوضاء المائية للبحث وسفن الصيد ، وطرق وأنظمة قياسها بناءً على قوانين الصوتيات غير الخطية 2002 مرشح العلوم التقنية خليولوف ، فرغات أميرشانوفيتش
تطوير خوارزميات معالجة المعلومات في أنظمة قياس الزوايا متعددة المواضع باستخدام التحليل الطيفي السريع للإشارات 2005 مرشح العلوم التقنية Davletkaliev ، رومان كوانيشيفيتش
طرق ووسائل دعم الملاحة للطائرات ومراقبة الحركة الجوية بالاعتماد على تقنيات الأقمار الصناعية 2004 ، دكتور في العلوم التقنية Slepchenko ، بيتر ميخائيلوفيتش
نظرية وطرق تصميم أنظمة الهوائيات فائقة الاتساع لمعدات تحديد الاتجاه الراديوي للقواعد الثابتة والمتنقلة 2011 دكتور في العلوم التقنية Rembovsky ، Yuri Anatolyevich
استنتاج الأطروحة حول موضوع "الصوتيات" ، ماتفينكو ، يوري فيكتوروفيتش
أهم نتائج العمل:
1. تمت دراسة مبادئ بناء أنظمة خط الأساس فائق القصر وتم تحليل الطرق الرئيسية لتحديد الموقع الزاوي لمصدر إشارات الملاحة النغمية والنطاق العريض في معالجة المعلومات من هوائيات الاستقبال صغيرة الحجم.
يتم الحصول على تعبيرات الحساب ودراسة خصائص تحديد الاتجاه لمؤشرات اتجاه السعة مع معالجة البيانات الإجمالية والفرق.
تمت ملاحظة الدقة المحتملة المنخفضة لأنظمة أبسط تكوين تحتوي على زوج واحد أو اثنين أو ثلاثة أزواج من المستقبلات المتعامدة مع طرق معالجة بيانات الطور ، ويلاحظ الحاجة إلى تعقيد الأنظمة لزيادة الدقة.
تم اقتراح وتبرير طريقة لإيجاد اتجاه مصدر الإشارات اللونية ، بناءً على استخدام الهوائيات مع عدد كبير من المستقبلات الموضوعة بكثافة على قاعدة دائرية مع تحديد المرحلة التراكمية ، والتي يمكن تقليل الخطأ فيها إلى 0.1 درجة.
يتم الحصول على معادلات الحساب ، وباستخدام مثال الهوائيات الدائرية التي تحتوي على عدد كبير من العناصر ، يتم عرض الاتصال بين بيانات مستشعرات العنوان واللف والتقطيع وأخطاءها في قيمة معلمات التنقل المقاسة وأخطاءها.
بناءً على طريقة الاحتمال الأقصى ، يتم حل مشكلة المعالجة الإحصائية لبيانات الملاحة باستخدام هوائيات منفصلة ذات تكوين عشوائي. في هذه الحالة ، يتم تحديد تقدير المعلمات المرغوبة من خلال المعالجة المشتركة لجميع أزواج القنوات المأخوذة بأوزان مختلفة. تحتوي معاملات الوزن على كلٍّ من مكون هندسي ، يساوي مشتق دالة الطور فيما يتعلق بالمعامل المقاس ، ومكوِّن طاقة ، مساوٍ لنسبة الإشارة إلى الضوضاء العاملة في القناة من حيث الطاقة.
تُشتق نسب الحساب لتحديد خطأ اتجاه الاتجاه والاتجاه لعدد من تشكيلات الهوائي الأكثر شيوعًا: الخطي ، الدائري ، المركب.
تم تطوير أداة تحديد اتجاه الطور بناءً على استخدام هوائيات دائرية ذات حجم موجي كبير مع عدد محدود من العناصر.
يتم إثبات تقنية تقليل عدد قنوات المعالجة مع الحفاظ على الدقة الزاوية من خلال تقسيم إجراء تحديد الاتجاه إلى مرحلتين: إيجاد الاتجاه الخشن لتحديد قطاع العرض والحل الدقيق لمعادلة المحمل بتقريب أولي معين.
تم إثبات إمكانية حل غموض الطور الذي ينشأ أثناء تشغيل الهوائيات المتفرقة بطرق تحديد اتجاه السعة.
من المبرر نظريًا تحقيق استبانة زاوية من 0.1-0.2 درجة مع عدد القنوات 6-8 وحجم موجة الهوائي 3-5 أطوال موجية لتردد الملاحة.
يتم الحصول على العلاقات لحساب اتجاه الاتجاه بواسطة هوائي منفصل صغير الحجم ، وقت انتشار إشارة صوتية على الفتحة التي يمكن مقارنتها بفترة متوسط التردد للطيف المستقبَل.
2. تم إجراء أبحاث حول طرق تقييم دقة نظام GANS UKB وتم تطوير طرق لقياس خصائصها في الظروف المختبرية والميدانية.
لوصف هوائي منفصل متعدد العناصر ، يُقترح وظيفة متجه ، يصف كل مكون منها لعنصر هوائي مختار اعتماد طور الإشارة الصوتية المستقبلة على اتجاه وصولها. يعد التعريف الدقيق (التجريبي) للوظيفة ضروريًا عند حل مشكلة العثور على كائن التنقل.
تم تطوير حامل لاعتماد الهوائيات متعددة العناصر ، والذي يتم تركيبه في حوض صوتي مائي متخصص ويتضمن مصدرًا للإشارات المنظمة ونظام استقبال مزودًا بقرص دوار دقيق ومعدات قياس الطور متعدد القنوات للإشارات مثل النبضات الراديوية.
تم تطوير تقنية اعتماد الهوائي ، والتي تتكون من القياس التجريبي لوظيفة مرحلة الهوائي ، وتحديد الوظائف التحليلية التي تقارب البيانات التي تم الحصول عليها واستخدامها في حل معادلات تحديد الاتجاه ، مع جدولة الفرق بين تقدير الاتجاه الذي تم الحصول عليه وصحيحه (تحديد) القيمة في شكل تقدير للمكوِّن النظامي للخطأ.
تم تطوير وفحص هوائيات استقبال متعددة العناصر لعينات نظام التشغيل ، مما يوفر خطأ منهجيًا يبلغ حوالي 0.5 درجة.
تم إجراء تحليل مقارن لتشغيل GANS DB و UKB في ظروف البحر الضحلة مع تركيب ثابت لهوائي الاستقبال UKB.
يتم تحليل طريقة لتقدير القياسات الزاويّة النسبية بناءً على معالجة بيانات النطاق.
تم إثبات طريقة اعتماد نظام UKB في البحار الضحلة باستخدام مستجيب منارة مرجعي يعتمد على معالجة بيانات النطاق. يتضح أنه مع وجود خطأ نسبي في قياس النطاق يبلغ بضعة أعشار من النسبة المئوية ، فإن الخطأ في قيمة المحمل المحسوبة لـ AUV التي تتحرك حول UKB - لا يتجاوز الهوائي والمنارة على طول مسار مغلق درجة واحدة.
تم إجراء التحليل وتم تحديد خصائص الدقة لنظام UKB بناءً على نتائج العملية في ظروف أعماق البحار. تم استخدام البيانات من GANS DB والبيانات من نظام الملاحة على متن الطائرة ومستشعر العمق وبيانات تحديد المدى كبيانات مرجعية. يتم عرض مدى ملاءمة تحليل التباين التفاضلي لبيانات النطاق لتحديد الأجزاء الفردية لمسار AUV وإمكانية المتوسط المعقول للبيانات الزاوية أثناء معالجة المسار. نتيجة للتحليل ، تم إثبات الاستنتاج حول خطأ القياسات الزاوية لحوالي 0.5 درجة.
تم إثبات تقنية القضاء على غموض الطور الناتج عن زيادة حجم قاعدة القياس عن طريق المعالجة الإحصائية للإشارات متعددة الترددات والتحقق منها تجريبياً.
تم تطوير هوائي استقبال متعدد العناصر ومعدات لإرسال (استقبال) الإشارات المعقدة ودراستها تجريبياً ، وتم إجراء تقديرات لأخطاء النظام ، وهي أعشار درجة.
3. تم البحث عن طرق وتطوير وسائل لنظام عالي السرعة لنقل المعلومات عبر قناة صوتية مائية من AUV إلى سفينة دعم.
تمت دراسة طرق إنشاء محولات طاقة كهرضغطية عريضة النطاق وتم تطوير محولات طاقة أسطوانية وقضيب متخصصة ذات خصائص توجيهية خاصة للتشغيل في معدات نظام الاتصالات: محول طاقة أسطواني عالي الكفاءة مع عرض نطاق يصل إلى ثلاثة أوكتافات باستخدام طبقات رفيعة مطابقة من البوق التكوين ، XH الذي يفي بمتطلبات التشغيل في البحر الضحل ؛ يُقترح محول طاقة متعدد الرنين لبث واستقبال إشارات متعددة التردد ، يتم تصنيعه في شكل مجموعة من الأسطوانات الانضغاطية المحورية ؛ المحولات الكهروإجهادية للمكبس ذات السيرة الذاتية من النوع أحادي الجانب مقترحة للتشغيل في ظروف قناة انتشار إشارة عمودية.
يتم تحليل بنية نظام نقل البيانات عبر قناة اتصال متعددة المسارات مع تكييف مخطط المعالجة عبر كتلة بيانات ذات طول محدود. يسبق إرسال فدرة المعلومات إجراء لتعيين معلمات المستقبل ، ويتم تحديد حجم الفدرة بواسطة الوضع الحاليقناة الاتصال. باستخدام طرق المحاكاة العددية ، يتم تحليل ميزات اختيار الإشارات المتصلة ويتم عرض مدى ملاءمة استخدام إشارة من خلال مفتاح تحويل الطور والتردد المدمج.
تم اقتراح تقنية لتقدير الاستجابة النبضية لقناة اتصال وتحسين لحظة التزامن عن طريق إرسال ومعالجة سلسلة من نبضات الطور المتناوب.
مخطط لاستقبال الإشارات من نظام اتصال بواسطة هوائي ملاحة متعدد العناصر مع تنفيذ الترشيح المكاني لحزمة مباشرة في ظروف تعدد المسيرات بناءً على البيانات المتعلقة بالموقع الزاوي لمصدر الإشارات والتداخل الذي تم الحصول عليه أثناء تشغيل GANS UKB مقترح ومبرر.
تم إجراء البحوث وإمكانية نقل المعلومات للكثيرين تردد قناةالاتصال بالتعادل الأولي لاستجابة تردد الاتساع من طرف إلى طرف للقناة واختيار الرسالة الحالية بناءً على تحليل مقارن للطاقة في كل قناة تردد. أكدت الدراسات التجريبية لنظام المعالجة هذا في بحر ضحل جدًا إمكانية استخدام معدات للإرسال الصور الرسوميةبسرعة حوالي 3000 بت في الثانية مع احتمالية منخفضة للأخطاء.
4. للملاحة على متن روبوت تحت الماء ، تم تطوير سجل دوبلر ودمجه في المجمع.
تم إجراء الأبحاث وتم تطوير هوائيات خاصة للتأخير مع حساسية عالية للصدى تم الحصول عليها بسبب المطابقة الصوتية الميكانيكية المثلى لمحولات الطاقة الكهروضغطية للهوائي مع بيئة العمل.
لزيادة سرعة التأخر ، تم اقتراح وتنفيذ طريقة للمعالجة الطيفية لإشارات النبضة القصيرة ، والتي توفر استبانة عالية التردد بسبب تكوين عمليات الإدراك شبه المتماسكة الطويلة للإشارات المنعكسة. تتيح هذه الطريقة تحديد مكونات السرعة بأقل قدر من التشتت في ثانية واحدة.
تم تطوير عينة تجريبية من سجل دوبلر ويتم استخدامها كجزء من AUV
تم تطوير تقنية لمعايرة التأخر في الظروف الطبيعية عن طريق حساب سرعة AUV وفقًا لبيانات تحديد المدى الخاصة بـ GANS.
5 - تم تطوير نظام ملاحة صوتي مائي واختباره واختباره في عمليات حقيقية ، مما يوفر تكوين صورة معلومات ملاحية لتقدم المهمة على متن سفينة الدعم و AUV ، ويتألف من الملاحة الصوتية المائية ونقل المعلومات وقياس السرعة المطلقة .
تم تطويره واختباره في البحار الضحلة والعميقة وتم دمجه في مجمع الملاحة GANS UKB ، والذي يتضمن: مصدر إشارة ملاحة متزامنة في المنشأة ، مجمع معالجة السفن بهوائي استقبال على حبل كبل وجهاز استقبال GPS. يحتوي النظام على الخصائص التالية: المدى - 6-10 كم ؛ تحمل خطأ القياس - أقل من 1 درجة ؛ نطاق قياس الخطأ - 0.5٪. تم تأكيد إمكانية تشغيل النظام في وضع التحكم في الموضع لـ AUV مما يؤدي إلى انتقال طويل على طول جسم ممتد مع حركة وعاء الدعم وسحب هوائي الاستقبال بسرعة تصل إلى 5 عقدة.
تم تطوير نظام ملاحة UKB عالي التردد واختباره واستخدامه كجزء من مركبة مقيدة مع وضع المصدر على متن السفينة وجهاز الاستقبال - على السيارة.
تم تطوير واختبار معدات نقل المعلومات كجزء من الوسائل المائية الصوتية للملاحة ودعم المعلومات لـ AUVs من أجل المراقبة التشغيلية لحالة عمليات المسح والبحث في ظروف أعماق البحار وقناة اتصال عمودية. يوفر الجهاز نقل البيانات بسرعة 4000 بت في الثانية ، مع احتمال خطأ يبلغ حوالي واحد بالمائة ، مما يضمن نقل إطارات الصور التلفزيونية في 45 ثانية.
تم تطوير سجل دوبلر واختباره ودمجه في نظام الملاحة على متن الطائرة ، والذي يوفر قياس متجه السرعة المطلقة AUV في نطاق سرعة 0-2m / s مع خطأ يبلغ 1-2 سم / ثانية.
تقترح تقنية استخدام مجمع الملاحة:
GANS DB - لعمليات إطلاق AUV المتعددة في مناطق محددة مع البحث حسب المنطقة مع متطلبات دقة متزايدة.
GANS UKB في حالة الحاجة إلى انتقالات طويلة عند تتبع الأجسام الممتدة أو الأهداف المتحركة ، في حالة إطلاق AUV الطارئ ، في حالة الإطلاق السري.<
DL مع حساب المسارات عن طريق الحساب الميت - عندما يصل AUV إلى نقطة معينة ، أثناء الفحص الإضافي باستخدام أنظمة التلفزيون.
تم إثبات التشغيل الناجح للمجمع كجزء من AUV أثناء عمليات البحث الحقيقية في المحيط.
شكرا.
في الختام ، أود أن أعرب عن امتناني العميق لجميع موظفي IPMT الذين شاركوا في تطوير واختبار أنظمة السونار للمركبات تحت الماء. شكر خاص للأكاديمي Ageev M.D. ورؤساء الأقسام Kasatkin B.A. و Rylov N.I.
استنتاج
قائمة المراجع لبحوث الأطروحة دكتوراه في العلوم التقنية ماتفينكو ، يوري فيكتوروفيتش ، 2004
1. أجيف M.D. مركبة بدون طيار معيارية من 1.TP. - مجلة MTS ، 1996 ، المجلد. 30 ، 1 ، ص. 13-20.
2. المركبات الغاطسة غير المأهولة المستقلة. تحت رئاسة التحرير العامة. أكاد. أجيفا م ، د. - فلاديفوستوك ، دالوكا ، 2000 ، 272 صفحة.
4. ر. باب. ملاحة AUV للمسوحات العلمية تحت الماء. تكنولوجيا البحر ، 1990 ، ديسمبر ، ص 25-32.
6. جي روميو ، جي ليستر. التنقل هو مفتاح مهمات AUV. تكنولوجيا البحر ، 2001 ، ديسمبر ، ص 24 - 29.
7. بورودين في ، سميرنوف جنرال إلكتريك ، تولستياكوفا إن إيه ، ياكوفليف ج. مساعدات الملاحة الصوتية المائية. L. ، بناء السفن ، 1983 ، 262 ص.
8. Milne P.Kh. أنظمة تحديد المواقع المائية الصوتية. L. ، بناء السفن ، 1989 ، 316 ص.
9. Gestone J.A.، Cyr R.J.، Roesler G:، George E.S. التطورات الأخيرة في الملاحة الصوتية تحت الماء. مجلة الملاحة ، 1977 ، ص 30 ، 2 ، ص 246-280.
10. Boldyrev BC. طرق الدقة. تحديد الإحداثيات أثناء الأعمال المائية في أعالي البحار. بناء السفن في الخارج ، 1980. رقم 2. ص 29-42.
11. Kislov A.F.، Postnikov I.V. خصائص دقة أنظمة الملاحة منارة ذات القاعدة الصوتية الطويلة. تيز. نقل 2 كل الاتحاد. أسيوط. البحث والتطوير في المحيطات ، L. ، 1978. العدد 2 ، ص 95-96.
12. Kasatkin B.A.، Kobaidze V.V. ميزات الملاحة الصوتية المائية في منطقة الرف. فى السبت. المركبات تحت الماء وأنظمتها ، From-vo DVNTs ، فلاديفوستوك ، 1977 ، ص 84-88.
13. Kasatkin B.A.، Kobaidze V.V. نظام الملاحة المتزامن المائي الصوتي. براءة اختراع R.F. G01S 9/60 ، رقم 713278 ، 1978.
14. سميرنوف جنرال إلكتريك ، تولستياكوفا إن إيه ، أنظمة ملاحة مزودة بإشارات صوتية مائية. بناء السفن في الخارج. 1980 ، رقم 9 ، ص 45-54.
15. K. Vestgard ، R. Hansen ، B. Jalving ، H. Pedersen. استبيان HUGIN 3000 AUV - التصميم والنتائج الميدانية. - / التدخل تحت الماء 2001 /.
16. ت. مارتن و ج. بيلجريم. تحديات المسح في تحديد مواقع USBL الصوتية في المياه العميقة للمركبات المقيدة أو المربوطة تحت الماء. .- / التدخل تحت الماء 2001 /.
17. هوبرت توماس ، إريك بيتي. من المركبات ذاتية القيادة تحت الماء (AUV) إلى المركبات تحت الماء الخاضعة للإشراف (SUV). المحيطات - 97.
18. Paramonov A.A.، Klyuev MS، Storozhev P.P. بعض المبادئ لبناء أنظمة ملاحة مائية صوتية طويلة الأساس. السابع كثافة العمليات. علمي تقني أسيوط. "الأساليب والوسائل الحديثة لبحوث المحيطات" ، موسكو ، 2001 ، ص 244-245.
19. Paramonov A.A.، Afanasiev V.N. نظام الملاحة الصوتي المائي GANS-M. السادس الدولي. علمي تقني أسيوط. "الأساليب والوسائل الحديثة لبحوث المحيطات" ، موسكو ، 2000 ، ص. 100-112.
20. Ageev M.D. ، Blidberg D.R. ، Kiselev JI.B. ، Rylov N.I. ، Shcherbatyuk A.F. حالة وآفاق تطوير الروبوتات تحت الماء. التقنيات البحرية ، فلاديفوستوك ، دالوكا ، 2001 ، العدد 4 ، ص 6 - 23.
21. Ageev M.D. ، Kasatkin B.A. ، Kiselev L.V. ، Molokov Yu.G. ، Nikiforov V.V. ، Rylov N.I. الغواصات الأوتوماتيكية. L.، بناء السفن، 1981،248 ص.
22. جى مانلي. المركبات تحت الماء المستقلة لاستكشاف المحيطات. 0ceans-2003 ، ص 327-331.
23. Kobaidze V.V. سرعة انتشار الإشارات المائية الصوتية في مشكلة المدى. Preprint ، فلاديفوستوك ، TOY DVNTs AN SSSR ، 1979 ، 37 ص.
24. Kobaidze V.V. دراسة دقة المدى المائي الصوتي. - ملخص اطروحة دكتوراه. فلاديفوستوك ، TOY DVNTS AN SSSR ، 1981 ، 26 ص.
25. Xavier Lurton، Nicholas W. Millard. جدوى نظام تحديد المواقع الصوتية الأساسي طويل المدى لـ AUV. Proceeding of Ocean-94 ، بريست فرنسا ، 1994 ، المجلد 3 ، ص. 403-408.
26. Kasatkin B.A.، Kosarev G.V. ميزة تطوير APS من أجل AUV طويل المدى. وقائع Ocean-95 ، سان دييغو ، أكتوبر 1995 ، ضد. أنا ص. 175-177.
27. Kasatkin B.A. نظام تحديد المدى المتزامن الصوتي المائي بعيد المدى. براءة اختراع R.F. G01S 15/08، No.2084923، 1995.
28. تحديد المواقع الصوتية. www. mors.fr.product.
29. المدى المشترك واتجاه الاستشعار الملاحة. موديل NS-031. -www. sonatech.com
30. كاساتكين ب. نظام الملاحة المتزامن المائي الصوتي. براءة اختراع R.F. G01S 15/08، No.2084924، 1995.
31. دي طومسون ، إس إلسون. أنظمة تحديد المواقع الصوتية من الجيل الجديد. 0ceans-2002 ، ص 1312-1318.
32. مستجيب عام قابل للبرمجة ومستجيب / مستجيب فرعي صغير للغاية ، أنواع 7971/7977 / 7978،7970 / 7973 www.sonardyne.co.uk
33. بي مانسون. تحديد المواقع على نطاق واسع بدقة lm. - نظم المحيطات الدولية ، ديسمبر 2001 ، ص. 15-19.
34. Kasatkin B.A.، Kosarev G.V. الأسس المادية للمدى الصوتي. - Vestnik DVO R AND998 ، رقم 3.p.41-50.
35. Kobaidze V.V. نماذج الأخطاء والخوارزميات لمعالجة معلومات المدى في أنظمة الملاحة المائية الصوتية. Preprint ، فلاديفوستوك ، TOY DVNTS AN SSSR ، 1979 ، 42 ص.
36. كاساتكين ب. الخصائص الثابتة لمجال الصوت في محيط طبقي. نقل أكاديمية العلوم في اتحاد الجمهوريات الاشتراكية السوفياتية ، 1986 ، 291 ، رقم 6 ، ص. 1483-1487.
37. إم ديفينبو ، ج. بيلينجهام ، شميدت. العلاقة بين المواضع الكروية والقطعية. وقائع Ocean-96 ،
38. Kasatkin B.A.، Kosarev G.V. تحليل دقة قياس إحداثيات منارات جهاز الإرسال والاستقبال لنظام الملاحة الصوتية المائية. التقنيات البحرية ، العدد الأول. فلاديفوستوك ، Dalnauka ، 1996 ، ص 60-68.
39. Kasatkin B.A.، Kosarev G.V. استخدام طريقة الاجتياز لتحديد الإحداثيات المطلقة لإشارات المستجيب. التقنيات البحرية ، العدد الثاني. فلاديفوستوك ، Dalnauka ، 1998 ، الصفحات 65-69.
40. J. Opderbecke. معايرة في البحر لنظام تحديد المواقع تحت الماء USBL. - المحيطات "2000.
41. Posidonia 6000. نظام تحديد المواقع الصوتي تحت الماء. www.ixsea-ocean.com
42. النشرة الإخبارية. كونغسبيرغ سيمراد. العدد 2 - 2000 www.kongsbergsimrad.com.
43. K. Vestgard، R. Hansen، B. Jalving، O.A. بيدرسن. لعبة HUGIN 3000 SURVEY AUV. نتائج التصميم والميدان. 0ceans "2001.
44LXT نظام تتبع منخفض التكلفة. www.ore.com
45. Thomas C. Austin ، Roger Stokey ، C. von Alt ، R. Arthur ، R. Goldborough. RATS ، نظام تتبع صوتي نسبي تم تطويره لملاحة المحيطات العميقة "97.
46. توماس سي أوستن ، روجر ستوكي. التتبع الصوتي النسبي. - تكنولوجيا البحر ، 1998 ، مارس ، ص 21-27.
47. إم واتسون ، سي لوجينز وي. أوتشي. نظام خط أساسي قصير للغاية (SSBL) جديد وعالي الدقة. تكنولوجيا تحت الماء ، 1998 ، ص 210-215 ، طوكيو ، اليابان.
48. جيمس إي ديفو. أنظمة تحديد المواقع الصوتية تحت الماء. المحيطات -95 ، المجلد 1 ، ص. 167-174 ، سان دييغو ، الولايات المتحدة الأمريكية.
49. نوترونيكس. تحديد المواقع بدقة ATS. www.nautronix.com
50. Yin Dongmei ، Song Xinjian ، Feng haihong. التكنولوجيا الرئيسية لتنفيذ نظام تتبع وتحديد موقع الجسم تحت الماء. - ورشة العمل الدولية ثلاثية الأبعاد هاربين ، الصين ، 2002 ، ص 65.
51. Yin Dongmei ، Song Xinjian ، Feng haihong. تصميم نظام تحديد المواقع الصوتية تحت الماء. ورشة العمل الدولية ثلاثية الأبعاد هاربين ، الصين ، 2002 ، ص 43.
52. Komlyakov B.A. الأنظمة المائية الصوتية مع منارات جهاز الإرسال والاستقبال لتتبع الأنظمة التي يتم سحبها تحت الماء. - بناء السفن ، 1997 ، العدد 6 ، ص 39-45.
53. A. A. Paramonov، A. V. Nosov، V.N Kuznetsov، S. A. Dremuchev، and M. S. Klyuev، i I
54. Storozhev P.P. حول تحسين دقة نظام الملاحة الصوتي المائي مع خط أساس فائق القصر. السابع المؤتمر الدولي. في علم المحيطات ، م ، 2001 ، ص 80-81.
55. Bogorodsky A.V.، Koryakin Yu.A.، Ostroukhov A.A.، Fomin Yu.P. التكنولوجيا المائية الصوتية للبحث والتطوير في المحيطات. السابع المؤتمر الدولي. في علم المحيطات ، M. ، 2001 ، ص 266-269.
56. Zlobina N.V.، Kamenev S.I.، Kasatkin B.A. تحليل خطأ نظام الملاحة المائي الصوتي بخط أساس فائق القصر. فى السبت. الروبوتات تحت الماء وأنظمتها. العدد 5 ، 1992 ، فلاديفوستوك ، IPMT FEB RAS ، ص 116-123.
57. Kasatkin B.A.، Kulinchenko S.I.، Matvienko Yu.V.، Nurgaliev R.F. دراسة خصائص جهاز تحديد اتجاه المرحلة لـ UKB-GANS. - في السبت. الروبوتات تحت الماء وأنظمتها. Vsh.6 ، 1995 ، فلاديفوستوك ، Dalnauka ، ص 75-83.
58. Kasatkin B.A. تقدير خطأ مكتشف اتجاه UKB بقاعدة دائرية. فى السبت. التقنيات البحرية. القضية. 1،1996 ، فلاديفوستوك ، Dalnauka ، ص 69-73.
59. Kasatkin B.A.، Matvienko Yu.V. طريقة لتحديد اتجاه مصدر الإشعاع وجهاز لتنفيذه. رقم براءة الاختراع RF 2158430 ، الثور. الصورة رقم 33 ، 2000
60. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I. ، Nurgaliev RF ، Rylov R.N. نظام الملاحة الصوتي المائي ذو القاعدة القصيرة للغاية. التقنيات البحرية ، فلاديفوستوك ، Dalnauka ، 2000 ، العدد Z ، ص. 102-113.
61. Matvienko Yu.V. معالجة البيانات في مكتشف اتجاه UKB بناءً على هوائي متعدد العناصر غير كامل. الثامن الدولي. علمي تقني أسيوط. "الأساليب والوسائل الحديثة لبحوث المحيطات" موسكو ، 2003 ، الجزء 1 ، ص 24-25.
62. جون ج. برواكيس. الاتصالات الرقمية. دار نشر صناعة الإلكترونيات ، الصين ، بكين ، 2000 ، 928 ص.
63. إم ستويانوفيتش. التطورات الحديثة في الاتصالات الصوتية عالية السرعة تحت الماء. مجلة IEEE Oceanic Engineering ، المجلد 2 ، العدد 2 ، 1996 ، ص. 125-136.
64. م. ستويانوفيتش ، ج. كاتيبوفيتش ، ج. برواكيس. طور الاتصالات الرقمية المتماسكة للقنوات الصوتية تحت الماء. مجلة IEEE لهندسة المحيطات ، المجلد. 19 ، لا. 1 ، 1994 ، ص 100-111.
65. Stojanovic M.، J.A. كاتيبوفيتش وجي جي. برواسيس. تقليل تعقيد المعالجة المكانية والزمنية لإشارات الاتصالات الصوتية تحت الماء. - J. Acoust. soc. صباحا ، 98 (2) ، Pt.l ، أغسطس. 1995 ، ص 961-972.
66. ج. لبات. الاتصالات في الوقت الحقيقي تحت الماء. Ocean-94 ، بريست ، فرنسا ، المجلد 3 ، ص 501-506.
67. بيسيوس ، ف. كيمي. تعويض متعدد المسارات للاتصالات الصوتية تحت الماء. Ocean-94، Brest، France، vol. 1، p.317-322.
68. ليستر ر. المعالجة المكانية الزمانية لبيانات الاتصال الصوتي المتماسكة في المياه الضحلة. IEEE J. Ocean. م. المجلد 25 ، العدد 1 ، يناير 2000 ، ص. 40-51.
69. ليستر ر. شعاع التكيف للتواصل في المياه الضحلة
70. B. Geller، V. Capellano، J.M. بروسيير ، أ.سبار و جوردان. المعادل لنقل معدل الفيديو في الاتصالات متعددة المسارات تحت الماء. IEEE J. Ocean. م. المجلد 21 ، العدد 2 ، أبريل ، 1996 ، ص. 150-155.
71. بيلون د. ، كويلك ب. أداء أنظمة اتصالات صوتية عالية البيانات تحت الماء باستخدام تكوين الشعاع التكيفي والمعادلة. Ocean-94 ، بريست ، فرنسا ، المجلد 3 ، ص 507-512.
72. ر. كوتس. الاتصالات الصوتية تحت الماء. تكنولوجيا البحر ، 1994 ، لا. 6 ، ص. 41-47.
73. A. Zielinski، Young-Hoon Yoon، Lixue Wu. تحليل أداء الاتصالات الصوتية الرقمية في قناة المياه الضحلة. IEEE Journal Oceanic Engineering، Vol 20، No.4، 1995، p.293-299.
74. L. وو و A. Zielinski. رفض متعدد المسارات باستخدام وصلة صوتية ذات شعاع ضيق. -أوشنز- 88 ، بالتيمور ، ص 287-290.
75. Wang C.H.، Zhu Min، Pan Feng، Zhang X.J.، Zhu W.Q. مودم الاتصالات الصوتية تحت الماء MPSK.
76. ATM 870 Series. أوضاع القياس الصوتي عن بعد. دليل الاستخدام. - Datasonics فبراير 1999.
77. K. Scussel ، J. Rice ، S. Merriam. مودم صوتي جديد MFSK للتشغيل في قنوات المياه العكسية. محيطات 97 ، هاليفاكس.
78. J. Catipovic ، M. Deffenbaugh ، L. Freitag ، D. Frye. نظام قياس صوتي عن بعد لاكتساب والتحكم في بيانات رسو المحيطات العميقة. المحيطات - 89 ، ص. 887-892.
79. F. Caimi ، D. Kocak ، G.Ritter ، M. Schalz. مقارنة وتطوير خوارزميات الضغط للقياس عن بعد AUV. التطورات الأخيرة.
80. بي. بنين ، إي. تسفيليف. في بعض التقديرات التقريبية المستخدمة في حساب قنوات الاتصال السمعي المائي. مجموعة صوت الشرق الأقصى ، لا. 1 ، فلاديفوستوك ، 1975 ، ص. 15-18.
81. بي. بنين ، إي. Tsvelev ، A.V. شولجين. حساب الطاقة لقنوات الاتصال الصوتية المائية. مجموعة صوت الشرق الأقصى ، لا. 1 ، فلاديفوستوك ، 1975 ، ص. 19-23.
82. Chvertkin E.I. القياس المائي الصوتي في علم المحيطات. - L. 1978. 149p. ، دار النشر بجامعة لينينغراد.
83. ف. كودانيف ، س. بيسكاريف. تقنية لتحسين خصائص نظام لإرسال المعلومات الرقمية عبر قناة صوتية مائية في ظل ظروف استقبال أحادي الحزمة. مجلة أكوستيك ، 1996 ، المجلد 42 ، العدد 4 ، ص 573-576.
84. Yu.V. زاخاروف ، ف. كودانيف. مناعة الضوضاء للاستقبال التكيفي للإشارات الصوتية المعقدة في وجود انعكاسات من حدود المحيط. مجلة أكوستيك ، 1996 ، المجلد 42 ، العدد 2 ، ص 212-219.
85. Yu.V. زاخاروف ، ف. كودانيف. استقبال تكيفي للإشارات في قناة اتصال مائي صوتي مع مراعاة نثر دوبلر مجلة صوتية ، 1995 ، المجلد 41 ، العدد 2 ، الصفحات 254-259.
86. Yu.V. زاخاروف ، ف. كودانيف. دراسات تجريبية لنظام نقل المعلومات الصوتية بإشارات تشبه الضوضاء. مجلة أكوستيك ، 1994 ، المجلد 40 ، العدد 5 ، الصفحات 799-808.
87. Volkov A.V.، Kuryanov B.F.، Penkin M.M. الاتصالات الصوتية المائية الرقمية للتطبيقات المحيطية. السابع المؤتمر الدولي. في علم المحيطات ، م ، 2001 ، ص 182-189.
88.L.R. LeBlanc و R.P.J. بوجيان. المعالجة المكانية الزمانية لبيانات الاتصال الصوتي المتماسكة في المياه الضحلة. IEEE Journal Oceanic Engineering، Vol.25، No. 1 ، 2000 ، ص 40-51.
89. م سوزوكي ، ك. نيموتو ، ت. تسوتشيا ، ت. ناكاريشي. القياس الصوتي الرقمي عن بعد لمعلومات الفيديو الملون. ^ محيطات 89 ، ص 893-896.
90. ر. رولاندز. F. كوين. حدود معدل نقل المعلومات في القياس المائي الصوتي عن بعد - في الكتاب. الصوتيات تحت الماء ، موسكو ، مير ، 1970 ، ص 478-495.
91. Khrebtov A.A. عدادات سرعة السفينة. JI. ، بناء السفن ، 1978 ، 286 ثانية.
92. ك. جورجينسون ، ب. جروس ، ف. كراندال. تم تطبيق سونار دوبلر على نظام الملاحة الدقيق تحت الماء. محيط 93 ، المجلد 2 ، ص 469-474.
93. Kasatkin B.A.، Zlobina H.V.، Kasatkin S.B. تحليل خصائص محول كهرضغطية لهوائي لوغاريتم دوبلر مرحلي. فى السبت. التقنيات البحرية. القضية. 1،1996 ، فلاديفوستوك ، Dalnauka ، ص 74-83.
94. ر. بينكل ، إم ميريفيلد وجي سميث. التطورات الحديثة في تقنية دوبلر سونار. . محيط 93 ، المجلد 1 ، ص 282-286.
95. RDI Workhorse navigator DVL. www.rinstruments.com.
96. Demidin B.M.، Zolotarev B.V.، Matvienko Yu.V.، Plotsky V.D.، Servetnikov M.I. نظام الملاحة الصوتية المائية. ملخصات التقارير 22 علمية وتقنية. أسيوط Dalnevost. بولي تك. إنست. فلاديفوستوك ، 1974.
97. Demidin V.M.، Matvienko Yu.V.، Plotsky V.D.، Servetnikov M.I. نظام الملاحة للمركبة تحت الماء "SKAT". أطروحات التقارير 1 جميع الاتحاد. أسيوط. حول دراسة وتنمية موارد المحيطات العالمية ، فلاديفوستوك ، 1976.
98. Dorokhin K. A. تمثيل بيانات نظام الملاحة المائية الصوتية. فى السبت. الروبوتات تحت الماء وأنظمتها. العدد 5 ، 1992 ، فلاديفوستوك ، IPMT FEB RAS ، ص 94-100.
99. Dorokhin K. A. أجهزة وبرامج لوحدة السفينة الخاصة بنظام الملاحة الصوتية المائية. فى السبت. الروبوتات تحت الماء وأنظمتها. العدد 5 ، 1992 ، فلاديفوستوك ، IPMT FEB RAS ، ص. 101-109.
100- دوروخين ك. تحكم نظام الملاحة المائية الصوتية. فى السبت. الروبوتات تحت الماء وأنظمتها. 1990 ، فلاديفوستوك ، IPMT FEB AS اتحاد الجمهوريات الاشتراكية السوفياتية ، ص. 102108.
101- سوسولين يو. الأسس النظرية للملاحة بالرادار والراديو. م ، الإذاعة والتواصل ، 1992 ، ص. 134.
102- ماتفينكو يو في. على دقة اتساع محددات الاتجاه. - التقنيات البحرية ، فلاديفوستوك ، دالناوكا ، 2003 ، العدد 5 ، ص 56-62.
103.سماريشيف (دكتور في الطب) ، دوبروفولسكي يو. هوائيات صوتية مائية. كتيب. - JI. ، بناء السفن ، 1984 ، ص. 171.
104. Ya.D. شيرمان ، في. مانجوس. نظرية وتقنية معالجة معلومات الرادار على خلفية التداخل. M. ، الراديو والاتصالات ، 1981 ، 416 ق.
105. J. Bendat، A. Peirsol. التحليل التطبيقي للبيانات العشوائية. موسكو ، مير ، 1989 ، 542 ص.
106. Kenneth S. Miller، Marvin M. Rochwarger. اقتراب التباين لتقدير العزم الطيفي. معاملات IEEE على نظرية المعلومات ، سبتمبر. 1972 ، ص 588-596.
107. Weiqing ZHU، Wen XU، Jianyun YU. تقدير خطأ مقدر الطور التفاضلي لارتباط زوج النبض لمصفوفة السونار. المحيطات - 96.
108. Zhu WeiQing ، وانغ تشانغ هونغ ، وبان فينغ ، وتشو مين ، وزانغ شيانغ جون. تقدير الطيف في ADSP. المحيطات - 97.
109. تطوير الأجهزة والأجهزة ومبادئ بناء الأنظمة المائية الصوتية لمركبة تحت الماء. - // تقرير عن البحث والتطوير "Mayak-IPMT" // ، ناوشن. روك. Matvienko Yu.V.Vladivostok، SPC NPO Dalstandart، 1992، 190p.
110. ماتفينكو يو في ، ريلوف آر إن ، ريلوف إن. تطوير هوائي استقبال لسونار مسح جانبي لقياس الأعماق. السابع كثافة العمليات. علمي تقني أسيوط. "الأساليب والوسائل الحديثة لبحوث المحيطات" ، موسكو ، 2001 ، ص.
111. تطوير وإنشاء مركبة تحت الماء مستقلة غير مأهولة مع نطاق أكبر واستقلالية. // علم. روك. الأكاديمي أجيف M.D. ، المسؤول قام به Matvienko Yu.V.، Vladivostok، IPMT FEB RAS، 2001، No. State Reg. 01.960.010861.
112- تقارير خاصة عن البحث والتطوير "K-1R" // كبير المصممين الأكاديميين Ageev M.D. ، نائب الرئيس. خاصية Matvienko Yu.V. فلاديفوستوك ، IPMT FEB RAS ، 1998-2003
113- ج. كورن ، ت. كورن. كتيب الرياضيات - موسكو ، نوكا ، 1970 ، 720 ثانية.
114- ماتفينكو يو في. المعالجة الإحصائية للمعلومات من نظام الملاحة المائي الصوتي مع خط أساس فائق القصر. فى السبت. التقنيات البحرية. العدد 2 ، 1998 ، فلاديفوستوك ، Dalnauka ، ص 70-80.
115. ريلوف ن. حول تحديد معلمات الملاحة في UKB GANS وفقًا لبيانات هوائي متعدد العناصر. فى السبت. التقنيات البحرية ، فلاديفوستوك ، دالوكا ، 2003 ، العدد 5 ، ص 46-55.
116 أ. ستيل ، سي بيرن ، ج. رايلي ، إم. سويفت. مقارنة أداء خوارزميات تقدير المحامل عالية الدقة باستخدام بيانات المحاكاة واختبار البحر. مجلة IEEE Journal of Oceanic Engineering ، المجلد 8 ، العدد 4 ، 1993 ، ص 438-446.
117. P. Kraeuther، J. Bird. معالجة صفيف المكونات الرئيسية لرسم خرائط Swath الصوتية. المحيطات - 97.
118. دارات متكاملة كبيرة جداً ومعالجة إشارات حديثة. إد. S. Goon، X. Whitehouse. T. Kailata. ، موسكو ، الراديو والاتصالات ، 1989 ، 472 ص.
119 ـ ماربل الابن. سي. التحليل الطيفي الرقمي وتطبيقاته. مير ، 1990 ، 584 ثانية.
120. أ. ستيل ، سي بيرن. معالجة الصفيف عالية الدقة باستخدام تقنيات الترجيح الضمني. مجلة IEEE لهندسة المحيطات ، المجلد. 15 ، لا. 1 ، 1990 ، ص 8-13.
121. ر روي وتي كيلاث. ESPRIT- تقدير معلمات الإشارة عبر تقنيات الثبات الدوراني. معاملات IEEE على الصوتيات ومعالجة الكلام والإشارة ، المجلد 37 ، رقم 7 ، 1989 ، ص 984-994.
122- جاو هوغزي ، شو شينشيغ. البحث عن طريقة الكشف عن الطور في نظام قياس الأعماق متعدد الحزم. IWAET-99 ، هاربين ، الصين ، 1999 ، ص. 198-203.
123. Kinkulkin I.E.، Rubtsov V.D.، Fabrik M.A. طريقة المرحلة لتحديد الإحداثيات. م ، 1979 ،. 280 ثانية.
124- يو في ماتفينكو ، في إن. ماكاروف ، إس آي كولينشينكو ، ور. ن. ريلوف ، مكتشف اتجاه إشارات ملاحة النطاق العريض. فى السبت. التقنيات البحرية ، فلاديفوستوك ، Dalnauka ، 2000 ، العدد Z ، ص. 114-120.
125. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I.، Nurgaliev R.F.، Rylov R.N.، Kasatkin B.A. مكتشف الاتجاه لنظام الملاحة الصوتي المائي بقاعدة فائقة القصر. براءة RF رقم 2179730 ، الثور. الصورة رقم 5 ، 2002
126 ب. دوغلاس و ر. بيتش. تقنيات تكوين الشعاع المثلى للصفائف التي تمت معايرتها بشكل غير كامل. وقائع Ocean-96 ،
127. م. أجيف ، أ. بوريكو ، يو. فاولين ، ب. جورناك ، ب. زولوتاريف ، يو في. ماتفينكو ، أ. Shcherbatyuk غاطسة TSL مطورة للعمل على الرفوف والأنفاق. - جلس. التقنيات البحرية ، فلاديفوستوك ، دالوكا ، 2000 ، العدد 3 ، ص 23 - 38.
128. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I. حول اختيار هيكل وخصائص معدات قناة الاتصال الصوتي المائي لمركبة تحت الماء. -فى السبت. التقنيات البحرية ، فلاديفوستوك ، Dalnauka ، 1996 ، العدد 1 ، الصفحات 84-94.
129. Matvienko Yu. V. تقدير المعلمات الرئيسية لنظام الاتصال الصوتي المائي لمركبة تحت الماء. فى السبت. التقنيات البحرية. العدد 4 ، 2001 ، فلاديفوستوك ، Dalnauka ، ص 53-64.
130- دراسات تنبؤية بشأن إنشاء مجموعة موحدة من المركبات المستقلة الخاضعة للرقابة من أجل تحسين كفاءة نظم إضاءة الوضع تحت الماء ، والملاحة ، والحرب المضادة للغواصات ، ومكافحة الألغام
131- البحرية. // تقرير عن بحث "Centurion-DVO" // ، Nauchn. روك. الأكاديمي أجيف M.D. ، المسؤول الفنان Matvienko Yu.V. ، فلاديفوستوك ، IPMT FEB RAS ، 1996
132- الأسس النظرية للرادار. إد. في. دوليفيتش ، موسكو ، الراديو السوفيتي ، 1978 ، 608.
133. Kasatkin B.A.، Matvienko Yu.V. حول تقييم المحولات الكهروضغطية الأسطوانية منخفضة التردد ذات النطاق العريض. مجلة أكوستيك ، 1983 ، المجلد 29 ، العدد 1 ، ص 60-63.
134- Balabaev S.M.، Ivina N.F. النمذجة الحاسوبية للتذبذبات والإشعاعات لأجسام محدودة الحجم. فلاديفوستوك ، Dalnauka ، 1996 ، 214 ص.
135. محولات الطاقة بيزوسيراميك. كتيب ، محرر. بوجاتشيفا إس. - لينينغراد ، بناء السفن ، 1984 ، 256 ثانية.
136. Matvienko Yu.V. تطوير وبحث طرق لوصف وإنشاء محولات الطاقة الكهروضغطية الأسطوانية عريضة النطاق. ديس مجردة. دكتوراه. DPI Far Eastern Scientific Center التابع لأكاديمية العلوم في اتحاد الجمهوريات الاشتراكية السوفياتية ، 1985 ، 22p.
137. Matvienko Yu.V.، Ermolenko Yu.G.، Kirov I.B. ميزات تطوير هوائيات متوسطة المدى للأنظمة المائية الصوتية لمركبة أعماق البحار. تيز. نقل Interuniversity أسيوط. ، دار النشر TOVVMU ، فلاديفوستوك ، 1992 ، ص 78-83.
138- ف. كساتكين ، جو. لاريونوف ، Matvienko Y.V. تطوير مجموعة المياه العميقة لملف التعريف الفرعي. - Proceeding of Oceans-94 ، بريست فرنسا ، 1994.
139. Kasatkin B.A.، Matvienko Yu.V. طيف التردد الطبيعي لمحول طاقة كهرضغطية أسطواني. مجلة أكوستيك ، 1979 ، المجلد 25 ، العدد 6 ، ص 932-935.
140. كساتكين ب. ، إرمولينكو يو جي ، ماتفينكو يو في. محول بيزو متعدد الوظائف للأبحاث تحت الماء. جلس. الروبوتات تحت الماء وأنظمتها ، IPMT FEB RAS ، العدد 5 ، 1992 ، ص. 133-140. "
141. Ermolenko Yu.G.، Kasatkin B.A.، Matvienko Yu.V. باعث صوتي مائي. براءة اختراع الاتحاد الروسي رقم 2002381 ، 1993.
142. كازاتكين ب. أ. ، ماتفينكو يو. محول كهربائي صوتي. -. المصادقة. شهادة No. 1094159، Bull. الموافقة المسبقة عن علم ، رقم 19 ، 1984.
143. Matvienko Yu.V. حول تأثير هيكل الملء الداخلي على خصائص محولات الطاقة الكهروضغطية الأسطوانية. في كتاب: استخدام الأساليب الفيزيائية الحديثة في البحث والتحكم غير المدمر ، خاباروفسك ، 1981 ، ج 2 ، ص. 125-126.
144. كاساتكين بي إيه ، ماتفيينكو يو في. محول طاقة كهرضغطية أسطواني مع انعكاس الإشعاع الداخلي في كتاب: استخدام الأساليب الفيزيائية الحديثة في البحث والتحكم غير المدمر ، خاباروفسك ، 1981 ، الجزء 2 ، ص 131-132.
145. كاساتكين ب. قياس باعث نطاق تردد الصوت. القياسات الصوتية. الطرق والوسائل. الدورة الرابعة للجمعية الصوتية الروسية ، موسكو ، 1995 ، ص 4.
146. Kasatkin B.A.، Matvienko Yu.V. محول كهربائي صوتي أسطواني. المصادقة. شهادة رقم 1066665 ، الثور. الموافقة المسبقة عن علم ، العدد 2 ، 1984.
147. Kasatkin B.A.، Matvienko Yu.V. محول كهرضغطية أسطواني بخصائص محكومة. مجلة أكوستيك ، 1982 ، المجلد 28 ، العدد 5 ، الصفحات من 648 إلى 652.
148. Kasatkin B.A.، Matvienko Yu.V. جهاز للإشعاع الصوتي واسع النطاق. المصادقة. شهادة رقم 794834 ، 1982.
149- تحليل وتطوير الهوائيات المائية الصوتية عريضة النطاق القائمة على محولات الطاقة من السيراميك البيزو. // تقارير عن بحث "المفكر -1" // ، ناوشن. روك. Matvienko Yu.V.، Vladivostok، SPC NPO Dalstandart، 1983-1985
150. تطوير واختبار مسار الانبعاث للإشارات ذات الشكل الخاص.
151. تقارير عن الجزء المكون من العمل البحثي "Evolvent-strip" / / ، Nauchn. روك. Matvienko Yu.V.، Vladivostok، SPC NPO Dalstandart، 1988-1990
152- دراسة وظيفة النقل للدليل الموجي الصوتي والهوائيات.
153. تقارير عن أبحاث "أكوامارين" // ، ناوشن. روك. Kasatkin B.A. ، المسؤول قام به Matvienko Yu.V.، Vladivostok، GFC NPO Dalstandart، 1989 .94s. ، رقم الدولة Reg. 01.890.073426
154. كاساتكين بي إيه ، ماتفيينكو يو في. الخصائص الدافعة لمحولات الطاقة الكهرضغطية الأسطوانية. تيز. Dokl All-Union Conf. محيط العالم ، فلاديفوستوك ، 1983 ، ص. السادس عشر.
155. Rylov N.I. ، Matvienko Yu.V. ، Rylov R.N. هوائي استقبال سونار مسح جانبي لقياس الأعماق. براءة اختراع RF رقم 2209530 ، 2003
156- ر. مونسينجو ، تي دبليو. ميلر. صفائف الهوائي التكيفي. M. ، الراديو والاتصالات ، 1986 ، 446 ق.
157. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I. في إحدى طرق بناء مستقبل GASS لبحر ضحل جدًا ، جلس. بحث وتطوير المحيطات العالمية ، 6 عموم روسيا. صوتي Conf. ، فلاديفوستوك ، 1998 ، ص. 162-163.
158. Matvienko Y.V.، Makarov V.N.، Kulinchenko S. I. نظام بسيط للاتصال الصوتي المائي في البحر الضحل لـ AUV. بناء السفن وهندسة المحيطات ، المشاكل ووجهات النظر ، فلاديفوستوك ، 2001 ، ص. 495-498.
159. Matvienko Yu.V.، Makarov B.N.، Kulinchenko S.I. نظام اتصال صوتي مائي بسيط في البحر الضحل لمركبات AUV. مشاكل وأساليب تطوير وتشغيل الأسلحة والمعدات العسكرية للبحرية ، العدد 32 ، فلاديفوستوك ، TOVMI ، 2001 ، ص 268-275.
160. جورجينسون ، ب. جروس ، ف. كراندال. H. Allegret. جيل جديد من أجهزة قياس التيار الصوتية. - المحيطات 94 ، المجلد 1 ، ص 429-434.
161 ب. بورديك. تحليل الأنظمة المائية الصوتية. JI. ، بناء السفن ، 1988 ، 358 ص.
162. تي لاغو ، ب. إريكسون وم. أسمان. طريقة Symmiktos: طريقة تقدير قوية ودقيقة لتقدير تيار دوبلر الصوتي. محيطات -93 ، المجلد 2 ، ص 381-386.
163. تي لاغو ، ب. إريكسون وم. أسمان. التقدير الطيفي للوقت القصير لبيانات مقياس دوبلر الصوتي الحالي. المحيط 96.
164. هـ. سوساكي. خوارزمية سريعة لقياس الترددات عالية الدقة. تطبيق على الموجات فوق الصوتية دوبلر سونار. 0ceans-2000 ، ص. 116-121.
165. هـ. سوساكي. خوارزمية سريعة لقياس التردد عالي الدقة. تطبيق على الموجات فوق الصوتية دوبلر سونار. IEEE Journal Oceanic Engineering ، المجلد 27 ، رقم. 1 ، 2002 ، ص 5-12.
166. Matvienko Yu.V.، Kulinchenko S.I.، Kuzmin A.V. تراكم شبه متماسك لإشارات النبضات القصيرة لزيادة سرعة سجل دوبلر. فى السبت. التقنيات البحرية ، فلاديفوستوك ، Dalnauka ، 1998 ، العدد 2 ، ص 81-84.
167. Matvienko Yu.V.، Makarov V.N.، Kulinchenko S.I. ، كوزمين أ. مسار استلام براءة اختراع لسجل دوبلر نابض عالي الدقة للاتحاد الروسي رقم 2120131 ، 1998
168. ماتفينكو يو في ، كوزمين أ. سجل دوبلر صغير الحجم لـ AUVs - المؤتمر العلمي والتقني الروسي الخامس "الحالة الحديثة ومشاكل الملاحة وعلوم المحيطات" (NO-2004 ، سانت بطرسبرغ).
169. Matvienko Yu.V.، Nurgaliev RF، Rylov N.I. نظام التتبع الصوتي المائي لتحديد موقع مركبة ذاتية القيادة تحت الماء (AUV) - صوتيات المحيط ، Dokl. 9 مدرسة-سم. أكاد. JI.M. بريخوفسكي موسكو ، 2002 ، ص 347-350.
170. Matvienko Yu.V.، Makarov V.N.، Nurgaliev R.F. AUV navigation and information support module. تيز. نقل ، TOVVMU ، فلاديفوستوك ، 1998. ،
171. Zolotarev V.V.، Kasatkin B.A.، Kosarev G.V.، Kulinchenko S.I.، Matvienko Yu.V. مجمع صوتي مائي لمركبة تحت الماء مستقلة وغير مأهولة في أعماق البحار. جلس. وقائع الجلسة العاشرة للأكاديمية الروسية للتربية ، موسكو ، 2000. ص 59 - 62.
172. أجيف دكتوراه في الطب ، كاساتكين بكالوريوس ، ماتفينكو يو في ، ريلوف آر إن ، ريلوف إن. تساعد الملاحة الصوتية المائية لروبوت تحت الماء. الثامن الدولي. علمي تقني أسيوط. "الأساليب والوسائل الحديثة لبحوث المحيطات" ، موسكو ، 2003 ، الجزء 2 ، ص 40-41.
173. Ageev M.D. ، Vaulin Yu.V. ، Kiselev JI.V. ، Matvienko Yu.V. ، Rylov N.I. ، Shcherbatyuk A.F. أنظمة الملاحة تحت الماء لـ AUVs. -VIII Int. علمي تقني أسيوط. "الأساليب والوسائل الحديثة لبحوث المحيطات" ، موسكو ، 2003 ، الجزء 2 ، ص. 13-22.
يرجى ملاحظة أن النصوص العلمية المعروضة أعلاه تم نشرها للمراجعة وتم الحصول عليها من خلال التعرف على النصوص الأصلية للأطروحات (OCR). في هذا الصدد ، قد تحتوي على أخطاء تتعلق بنقص خوارزميات التعرف. لا توجد مثل هذه الأخطاء في ملفات PDF للأطروحات والملخصات التي نقدمها.
الصوتيات المائية تحت الماء الروسية في مطلع القرن الحادي والعشرين
علم الصوتيات العسكرية هو علم النخبة ، لا يمكن تطويره إلا من خلال دولة قوية
أليكساندروف الألماني
من خلال امتلاك أعلى الإمكانات العلمية والتقنية (يعمل 13 طبيبًا وأكثر من 60 مرشحًا للعلوم في المؤسسة) ، يطور الاهتمام المجالات التالية ذات الأولوية في مجال الصوتيات المائية المحلية:
أنظمة وأنظمة السونار المنفعلة والنشطة متعددة الوظائف (HAC) وأنظمة (GAS) لإضاءة الوضع تحت الماء في المحيط ، بما في ذلك الغواصات والسفن السطحية والطائرات وأنظمة الكشف عن الغواصين ؛
الأنظمة ذات الهوائيات المقطوعة المرنة والممتدة للتشغيل في نطاق تردد واسع للسفن السطحية والغواصات ، فضلاً عن الغواصات الثابتة ؛
أنظمة السونار الثابتة النشطة والسلبية والنشطة الخاملة لحماية منطقة الرف من الاختراق غير المصرح به للسفن السطحية والغواصات ؛
أنظمة الملاحة والبحث والمسح المائي الصوتي "؛
محولات طاقة صوتية مائية ، هوائيات ، صفائف هوائيات ذات مراحل معقدة مع ما يصل إلى عدة آلاف من قنوات الاستقبال ؛
الشاشات الصوتية وإنصاف الصوت الشفاف ؛
أنظمة لنقل المعلومات عبر قناة صوتية مائية ؛
أنظمة تكيفية لمعالجة المعلومات المائية الصوتية في ظل ظروف هيدرولوجية صوتية معقدة وظروف تداخل الإشارة ؛
مصنِّفات الأهداف بتوقيعاتها وبواسطة البنية الدقيقة لمجال الصوت ؛
عدادات سرعة الصوت للسفن السطحية والغواصات.
يتكون القلق اليوم من عشر شركات تقع في سانت بطرسبرغ ومنطقة لينينغراد ، تاغانروغ ، فولغوغراد ، سيفيرودفينسك ، جمهورية كاريليا ، بما في ذلك معاهد البحوث ، ومصانع الإنتاج المتسلسل للمعدات المائية الصوتية ، والمؤسسات المتخصصة لخدمة المعدات في المرافق ، ومدافن النفايات . هؤلاء هم خمسة آلاف من المتخصصين المؤهلين تأهيلاً عالياً - مهندسين وعاملين وعلماء ، وأكثر من 25٪ منهم من الشباب.
طور فريق المؤسسة جميع منتجات GAK pl ذات الإنتاج الضخم ("Rubin" و "Ocean" و "Rubicon" و "Skat" و "Skat-BDRM" و "Skat-3") وعددًا من المجمعات المائية الصوتية و أنظمة السفن السطحية ("البلاتين" ، "Polynom" ، محطة كشف الغواصين "Pallada") ، الأنظمة الثابتة "Liman" ، "Volkhov" ، "Agam" ، "Dniester".
تعتبر المجمعات المائية الصوتية للغواصات التي أنشأتها المؤسسة وسائل تقنية فريدة من نوعها ، يتطلب إنشائها أعلى معرفة وخبرة واسعة في علم الصوتيات المائية. كما قال أحدهم ، فإن مهمة الكشف عن غواصة باستخدام مكتشف اتجاه الضوضاء تشبه في التعقيد مهمة اكتشاف لهب الشمعة على مسافة عدة كيلومترات في يوم مشمس مشرق ، ومع ذلك بالنسبة لغواصة مغمورة ، إن SAC هو عمليا المصدر الوحيد للمعلومات حول البيئة. المهام الرئيسية التي تم حلها بواسطة المجمع الصوتي المائي للغواصة هي اكتشاف الغواصات والسفن السطحية والطوربيدات في وضع تحديد اتجاه الضوضاء والتتبع التلقائي للأهداف وتحديد إحداثياتها وتصنيف الهدف واكتشاف الأهداف وإيجاد اتجاهها في وضع السونار ، اعتراض الإشارات الصوتية المائية في نطاق تردد واسع ، مما يوفر اتصالات صوتية تحت الماء عبر مسافات طويلة ، ويوفر نظرة عامة على الوضع القريب وسلامة الملاحة ، وإضاءة حالة الجليد عند الإبحار تحت الجليد ، وتوفير الحماية من الألغام والطوربيد للسفينة ، وحل مشاكل الملاحة - قياس السرعة والعمق وما إلى ذلك. بالإضافة إلى هذه المهام ، يجب أن يحتوي المجمع على نظام تحكم آلي قوي ، ونظام لمراقبة الضوضاء الخاصة به ، ويجب أن يؤدي باستمرار الحسابات الهيدرولوجية الأكثر تعقيدًا لضمان عمل جميع الأنظمة والتنبؤ بالوضع في منطقة الغواصة العمليات. يحتوي المجمع على أجهزة محاكاة لجميع أنظمة المجمع الصوتي المائي ، مما يوفر تدريبًا وتدريبًا للأفراد.
أساس أي مجمع صوتي مائي هو الهوائيات ، صفائف منفصلة مرحلية ذات شكل معقد ، تتكون من محولات طاقة بيزوسيراميك ، والتي يجب أن تضمن استقبال الإشارات من البيئة المائية على متن قارب يعاني من أحمال ضخمة بسبب الضغط الهيدروستاتيكي. تتمثل مهمة HAC في اكتشاف هذه الإشارات على خلفية ضوضاءها ، وضوضاء التدفق عندما يتحرك القارب ، وضوضاء البحر ، والأهداف المتداخلة ، ومجموعة من العوامل الأخرى التي تخفي الإشارة المفيدة.
HAC الحديث هو أكثر المعقدات الرقمية تعقيدًا التي تعالج تدفقات ضخمة من المعلومات في الوقت الفعلي (يتكون كل هوائي في المجمع من آلاف أو حتى عشرات الآلاف من العناصر الفردية ، وكل منها يجب معالجته بشكل متزامن مع جميع العناصر الأخرى). يمكن تشغيله فقط عند استخدام أحدث الأنظمة متعددة المعالجات التي توفر مهمة المراقبة المتزامنة ، في الفضاء ، ومتعددة النطاقات ، في التردد ، للحقول الصوتية المحيطة.
العنصر الأكثر أهمية والأكثر مسؤولية في المجمع هو أجهزة عرض المعلومات الواردة. عند إنشاء هذه الأجهزة ، لا يتم حل المشكلات العلمية والتقنية فحسب ، بل أيضًا المريحة والنفسية - لا يكفي تلقي إشارة من البيئة الخارجية ، فمن الضروري أن يقوم مشغلو المجمع (وهذا هو الحد الأدنى لعدد الأشخاص) في أي وقت من الأوقات ، لديك صورة كاملة عن البيئة ، والتحكم في سلامة السفينة وفعليًا ، وحركة مجموعة متنوعة من الأهداف ، السطحية ، تحت الماء ، والهواء ، والتي تمثل تهديدًا محتملاً أو مصلحة للغواصة. ويوازن المطورون باستمرار على شفا مشكلة - من ناحية ، لعرض أكبر قدر من المعلومات التي يعالجها المجمع ويحتاجه المشغل ، من ناحية أخرى ، حتى لا ينتهك "قاعدة ميلر" ، التي يحد من كمية المعلومات التي يمكن للفرد استيعابها في وقت واحد.
من السمات المهمة للأنظمة المائية الصوتية ، وخاصة الهوائيات ، متطلبات قوتها ومتانتها وقدرتها على العمل دون إصلاح واستبدال لفترة طويلة جدًا - كقاعدة عامة ، من المستحيل إصلاح هوائي صوتي مائي في ظروف الخدمة القتالية .
لا يمكن اعتبار نظام HAC الحديث نظامًا مغلقًا ومكتفيًا ذاتيًا ، ولكن فقط كعنصر من عناصر نظام مراقبة غواصة متكامل يتلقى ويستخدم معلومات مسبقة محدثة باستمرار حول الأهداف من أنظمة الكشف غير الصوتية والاستطلاع وما إلى ذلك ، و يصدر معلومات حول الوضع تحت الماء المتغير في النظام ، والذي يحلل المواقف التكتيكية ويصدر توصيات بشأن استخدام أنماط HAC المختلفة في حالة معينة.
يعد تطوير أنظمة السونار لغواصة منافسة مستمرة مع مطوري العدو المحتمل ، من ناحية ، نظرًا لأن المهمة الأكثر أهمية لـ SAC هي ضمان التكافؤ على الأقل في حالة مبارزة (العدو يسمعك ويتعرف عليك ، وأنت على نفس المسافة) ، ومن الضروري بكل الوسائل والوسائل زيادة نطاق SAC ، وبشكل أساسي في وضع تحديد اتجاه الضوضاء السلبية ، والذي يسمح لك باكتشاف الأهداف دون الكشف عن موقعك ، و مع شركات بناء السفن ومصممي الغواصات ، من ناحية أخرى ، نظرًا لأن ضجيج الغواصات يتناقص مع كل جيل جديد ، مع كل مشروع جديد ، حتى مع كل سفينة مبنية جديدة ، وتحتاج إلى اكتشاف إشارة ذات مستوى أقل من حيث الحجم من ضوضاء البحر المحيطة. ومن الواضح أن إنشاء مجمع صوتي مائي حديث لغواصات القرن الحادي والعشرين هو عمل مشترك لمطوري المجمع ومطوري القارب ، الذين يصممون ويضعون بشكل مشترك عناصر HAC على السفينة في مثل هذا الطريقة التي يعمل بها في ظل هذه الظروف هو الأكثر فعالية.
تتيح لنا تجربة تصميم SJSC pl ، المتوفرة في معهدنا ، تحديد مجالات المشاكل الرئيسية التي يمكننا من خلالها توقع زيادة كبيرة في الكفاءة في المستقبل القريب.
1. HAC مع هوائي غطاء مطابق ومطابق
أدى انخفاض مستوى ضوضاء الغواصة ، المرتبط بجهود المصممين لتحسين الحلول التقنية لهياكل هيكلها وآلياتها ، إلى انخفاض ملحوظ في نطاق SJC على طول المربعات الحديثة. الزيادة في فتحة الهوائيات التقليدية (كروية أو أسطوانية) محدودة بهندسة أنف الهيكل. كان الحل الواضح في هذه الحالة هو إنشاء هوائي مطابق (مقترن بخطوط pl) ، والمساحة الإجمالية ، وبالتالي إمكانات الطاقة التي تتجاوز بشكل كبير تلك الخاصة بالهوائيات التقليدية. تبين أن التجربة الأولى في إنشاء مثل هذه الهوائيات كانت ناجحة للغاية.
الاتجاه الواعد أكثر هو إنشاء هوائيات غطاء مطابقة تقع على طول جانب المربع. يمكن أن يصل طول هذه الهوائيات إلى عشرات الأمتار ، والمساحة - أكثر من مائة متر مربع. يرتبط إنشاء مثل هذه الأنظمة بالحاجة إلى حل عدد من المشكلات الفنية.
يقع هوائي الغطاء المطابق في منطقة التأثير السائد للموجات غير المتجانسة الناتجة عن التداخل الهيكلي ، بالإضافة إلى تداخل الأصل الهيدروديناميكي ، بما في ذلك التداخل الناجم عن إثارة الجسم بالتدفق القادم. الشاشات الصوتية ، التي تُستخدم تقليديًا لتقليل تأثير التداخل على الهوائي ، ليست فعالة بدرجة كافية في نطاق التردد المنخفض للهوائيات الموجودة على متن الطائرة. تتمثل الطرق الممكنة لضمان التشغيل الفعال للهوائيات على متن الطائرة ، وفقًا للتجربة الأجنبية ، في المقام الأول ، في الوضع البناء للآلات والآليات الأكثر ضجيجًا للغواصات بطريقة تجعل تأثيرها على الأنظمة الموجودة على متن الطائرة ضئيلًا ، وثانيًا ، الاستخدام الطرق الحسابية لتقليل تأثير التداخل الهيكلي على مسار SJC (طرق تكيفية للتعويض عن التداخل الهيكلي ، بما في ذلك استخدام مستشعرات الاهتزاز الموجودة على مقربة من الهوائي). يبدو واعدًا جدًا استخدام ما يسمى بأساليب "الطور النواقل" لمعالجة المعلومات ، والتي تجعل من الممكن زيادة كفاءة المجمع بسبب المعالجة المشتركة لحقول الضغط وسرعة الاهتزازات. هناك طريقة أخرى لتقليل تأثير التداخل الهيدروديناميكي ، والتي تؤثر على كفاءة هوائيات الغطاء المطابقة ، وهي استخدام محولات الأفلام (لوحات PVDF) ، والتي تسمح ، بسبب متوسطها على مساحة 1.0x0.5 متر ، إلى حد كبير (إذا حكمنا من خلال البيانات الواردة في الأدبيات - حتى 20 ديسيبل) تقلل من تأثير التداخل الهيدروديناميكي على مسار HJC.
2. خوارزميات تكيفية لمعالجة المعلومات المائية الصوتية ، بما يتفق مع بيئة الانتشار
من خلال "التكيف" يُفهم تقليديًا قدرة النظام على تغيير معاييره اعتمادًا على الظروف البيئية المتغيرة من أجل الحفاظ على كفاءته. فيما يتعلق بخوارزميات المعالجة ، فإن مصطلح "التكيف" يعني التنسيق (في المكان والزمان) لمسار المعالجة مع خصائص الإشارات والضوضاء. تستخدم الخوارزميات التكيفية على نطاق واسع في المجمعات الحديثة ، ويتم تحديد فعاليتها بشكل أساسي من خلال موارد الأجهزة في المجمع. الأكثر حداثة هي الخوارزميات التي تأخذ في الاعتبار التباين الزماني المكاني لقناة انتشار الإشارة. يتيح استخدام هذه الخوارزميات إمكانية حل مشاكل الكشف وتعيين الهدف والتصنيف في وقت واحد باستخدام معلومات أولية حول قناة انتشار الإشارة. يمكن أن يكون مصدر هذه المعلومات هو النماذج الأوقيانوغرافية الديناميكية التكيفية التي تتنبأ بموثوقية كافية بتوزيع درجة الحرارة والكثافة والملوحة وبعض المعلمات البيئية الأخرى في منطقة تشغيل الرصيف. هذه النماذج موجودة وتستخدم على نطاق واسع في الخارج. إن استخدام تقديرات موثوقة بدرجة كافية لمعلمات قناة الانتشار يجعل من الممكن ، بناءً على التقديرات النظرية ، زيادة دقة تحديد إحداثيات الهدف بشكل كبير.
3. الأنظمة الصوتية الموضوعة على مركبات تحت الماء بدون طيار يتم التحكم فيها ، مما يحل مشاكل الكشف البوليستاتيكي في الوضع النشط ، فضلاً عن مهام البحث عن الأجسام السفلية الطينية
الغواصة نفسها عبارة عن هيكل ضخم ، يبلغ طوله أكثر من مائة متر ، وبعيدًا عن جميع المهام التي تحتاج إلى حل لضمان سلامتك الشخصية يمكن حلها عن طريق وضع أنظمة مائية صوتية على السفينة نفسها. تتمثل إحدى هذه المهام في الكشف عن الأجسام الطينية القريبة من القاع والتي تشكل خطراً على السفينة. لعرض شيء ما ، عليك الاقتراب منه قدر الإمكان دون خلق تهديد لسلامتك. تتمثل إحدى الطرق الممكنة لحل هذه المشكلة في إنشاء مركبة بدون طيار يتم التحكم فيها تحت الماء ، موضوعة على غواصة ، قادرة على الاقتراب من الهدف محل الاهتمام وتصنيفه ، وإذا لزم الأمر ، تدميره بشكل مستقل أو عن طريق التحكم في سلك أو اتصال صوتي تحت الماء. في الواقع ، تشبه المهمة إنشاء المجمع الصوتي المائي نفسه ، ولكنها مصغرة ، بها وحدة دفع بالبطارية ، موضوعة على جهاز صغير ذاتي الحركة قادر على الإنزال من غواصة مغمورة ثم الالتحام مرة أخرى ، مع توفير اثنين من: طريقة الاتصال. في الولايات المتحدة ، تم إنشاء مثل هذه الأجهزة وهي جزء من أسلحة الجيل الأخير من الغواصات (من نوع فرجينيا).
4. تطوير وإنشاء مواد جديدة لمحولات الطاقة الصوتية المائية ، تتميز بانخفاض الوزن والتكلفة
محولات الطاقة البيزوسيراميك التي تشكل الهوائيات البحرية هي تصميمات معقدة للغاية ، والسيراميك البيزو هي مادة هشة للغاية ، ويلزم بذل جهد كبير لجعلها قوية مع الحفاظ على الكفاءة. ولفترة طويلة ، تم إجراء عمليات بحث عن مادة لها نفس خصائص تحويل الطاقة الاهتزازية إلى طاقة كهربائية ، ولكنها مادة بوليمر ، متينة ، وخفيفة الوزن ، ومتقدمة تقنيًا.
أدت الجهود التكنولوجية في الخارج إلى إنشاء أغشية بوليمر من نوع PVDF ، والتي لها تأثير كهرضغطية ومناسبة للاستخدام في بناء الهوائيات السطحية (الموضوعة على متن قارب). تكمن المشكلة هنا بشكل أساسي في تقنية إنتاج أغشية سميكة توفر كفاءة كافية للهوائي. الأمر الواعد أكثر هو فكرة إنشاء مادة لها خصائص السيراميك البيزو ، من ناحية ، وخصائص الشاشة الواقية التي تكتم (أو تنثر) إشارات السونار للعدو وتقلل من ضوضاء السفينة. هذه المادة (بيزوريسين) المترسبة على بدن الغواصة تجعل هيكل السفينة بأكمله هوائيًا صوتيًا مائيًا ، مما يوفر زيادة كبيرة في كفاءة الوسائل المائية الصوتية. يُظهر تحليل المنشورات الأجنبية أن مثل هذه التطورات في الولايات المتحدة قد انتقلت بالفعل إلى مرحلة النماذج الأولية ، بينما لم يكن هناك تقدم في بلدنا في هذا الاتجاه في العقود الأخيرة.
5. تصنيف الأهداف
مهمة التصنيف في علم الصوتيات المائية هي أصعب مشكلة مرتبطة بالحاجة إلى تحديد فئة الهدف من المعلومات التي تم الحصول عليها في وضع تحديد اتجاه الضوضاء (بدرجة أقل ، من بيانات الوضع النشط). للوهلة الأولى ، يتم حل المشكلة بسهولة - يكفي تسجيل طيف كائن مزعج ، ومقارنته بقاعدة البيانات ، والحصول على إجابة - ما هو نوع الكائن ، حتى اسم القائد. في الواقع ، يعتمد طيف الهدف على السرعة وزاوية الهدف ، ويحتوي الطيف الذي يلاحظه المجمع الصوتي المائي على تشوهات ناتجة عن مرور الإشارة عبر قناة انتشار غير متجانسة عشوائيًا (بيئة مائية) ، وبالتالي يعتمد على المسافة والطقس ومنطقة العمل والعديد من الأسباب الأخرى ، مما يجعل مشكلة التعرف على الطيف غير قابلة للحل عمليًا. لذلك ، في التصنيف المحلي ، يتم استخدام مناهج أخرى تتعلق بتحليل السمات المميزة المتأصلة في فئة معينة من الأهداف. هناك مشكلة أخرى تتطلب بحثًا علميًا جادًا ، ولكن هناك حاجة ماسة إليها ، وهي تصنيف الأجسام القريبة من القاع والغرينية المرتبطة بالتعرف على الألغام. من المعروف والمؤكد تجريبياً أن الدلافين تتعرف بثقة تامة على الأشياء المليئة بالهواء والماء المصنوعة من المعدن والبلاستيك والخشب. تتمثل مهمة الباحثين في تطوير طرق وخوارزميات تنفذ نفس الإجراء الذي يقوم به الدلفين عند حل مشكلة مماثلة.
6. مهمة الدفاع عن النفس
الدفاع عن النفس مهمة معقدة لضمان سلامة السفينة (بما في ذلك الحماية من الطوربيد) ، والتي تشمل الكشف والتصنيف وتحديد الهدف وإصدار البيانات الأولية لاستخدام الأسلحة و (أو) التدابير المضادة. تكمن خصوصية هذه المهمة في الاستخدام المتكامل للبيانات من الأنظمة الفرعية المختلفة لـ SAC ، وتحديد البيانات الواردة من مصادر مختلفة ، وتوفير تفاعل المعلومات مع أنظمة السفن الأخرى التي توفر استخدام الأسلحة.
ما ورد أعلاه ليس سوى جزء صغير من تلك المجالات البحثية الواعدة التي يجب القيام بها من أجل زيادة فعالية الأسلحة المائية الصوتية التي يتم إنشاؤها. ولكن من الفكرة إلى المنتج هو طريق طويل ، حيث يتطلب تقنيات متقدمة ، وقاعدة بحثية وتجريبية حديثة ، وبنية تحتية متطورة لإنتاج المواد اللازمة للمحولات والهوائيات الصوتية المائية ، إلخ. وتجدر الإشارة إلى أن السنوات الأخيرة قد تميزت بمؤسستنا من خلال إعادة تجهيز تقنية جادة لقاعدة الإنتاج والاختبار ، والتي أصبحت ممكنة بفضل التمويل من عدد من البرامج الفيدرالية المستهدفة ، المدنية والخاصة ، التي أجرتها الوزارة الصناعة والتجارة في الاتحاد الروسي. بفضل هذا الدعم المالي ، على مدار السنوات الخمس الماضية ، كان من الممكن إصلاح أكبر تجمع تجريبي صوتي مائي في أوروبا وتحديثه بشكل كبير ، والذي يقع في إقليم OAO Concern Okeanpribor ، من أجل التحديث الجذري للقدرات الإنتاجية للمصانع التسلسلية التي هي جزء من القلق ، الذي بفضله أصبح مصنع تاغانروغ "بريبوي" المؤسسة الأكثر تقدمًا في صناعة الأدوات في جنوب روسيا. نحن نقوم بإنشاء مرافق إنتاج جديدة - المواد البيزو ، لوحات الدوائر المطبوعة ، في المستقبل - إنشاء مناطق إنتاجية وعلمية جديدة ، وتقف لتركيب وتشغيل المعدات. في غضون 2-3 سنوات ، ستسمح لنا القدرات الإنتاجية والعلمية للمؤسسة ، بدعم من "بنك البيانات" للأفكار والتطورات الجديدة ، بالبدء في إنشاء أسلحة صوتية مائية من الجيل الخامس ، وهي ضرورية جدًا للبحرية.