 Entrada
EntradaCHP OGS HYDROACUSTICE Detección de objetivos. Complejos hidroacústicos PL en la lucha antiparina.
Submarinos de diesel-eléctricos soviéticos del edificio de la posguerra GAGIN VLADIMIR VLADIMIROVICH
Complejos hidroacústicos PL en la lucha antiparina.
Los botes diésel-eléctricos de los primeros proyectos de posguerra "allanaron la carretera" para las tripulaciones de los submarinos modernos, en las campañas oceánicas, ganando el funcionamiento de la operación de equipos militares, dominando las técnicas de natación tratada, estudiando la situación hidrológica e hidrográfica. de áreas estratégicamente importantes del océano, practicando las tácticas de anti-palmary y anti-worr.
Las tácticas de la lucha anti-submarino a menudo se reducen a la búsqueda y la detección del Águila PL usando medios hidroacústicos antes de lo que hace el enemigo.
Al mismo tiempo, el estado del medio circundante adquiere el valor más importante, especialmente tales parámetros, como las zonas de convergencia acústica y la posición del submarino en relación con la "termoclina".
Las zonas de convergencia son áreas en forma de anillo alrededor del barco submarino. El partido de sonido hacia abajo desde el punto de convergencia ubicado en la zona de convergencia se refracta dependiendo de la presión y la temperatura del agua, se mueve hacia arriba y hacia abajo con respecto a la superficie de la espiral a través de intervalos irregulares, que también dependen del estado del entorno. ambiente.
El comandante de la nave, tratando de no caer en estas áreas, en cuanto a dónde, en su opinión, el objetivo es que puede evitar la detección. Para hacer esto, debe estar dentro de las áreas donde el sonido se aplica a su fuente es simplemente radialmente.
La forma más fácil es tomar una posición por encima de la capa de salto de temperatura (termocline) o debajo de ella, de modo que comparta los submarinos, entonces los sonidos publicados por su motor probablemente se reflejarán en la capa y el barco enemigo no lo detectará .
El salto de temperatura es una capa límite de espacio subacuático, que separa agua superficial caliente y áreas profundas más frías.
Submarinos diesel junto con atómicos, ocupan un lugar prominente en los planes agresivos del bloque de la OTAN de los países de la OTAN. Según el libro de referencia "Jane", a mediados de 1980, en las flotas de la Unión del Atlántico Norte, había 186 embarcaciones diesel.
Los submarinos diesel tienen ciertas ventajas de atómicas, están relacionadas, en particular, menos ruido, lo que mejora las condiciones para el funcionamiento de las estaciones hidroacústicas (gas) al resolver los problemas de la lucha contra el submarino.
Actualmente, según la prensa extranjera, la integración de la tecnología hidroacústica con los sistemas de gestión de bius y armas que se producen sobre la base de un amplio uso de las computadoras. Como resultado, las capacidades tácticas del equipo hidroacústico cambian cualitativamente. La probabilidad de detectar objetivos y clasificación del contacto recibido ha aumentado. Además, se hizo real al mismo tiempo monitorear varios objetivos (hasta seis) objetivos y detectar rápidamente los cambios en su maniobra, obtener automáticamente información y emitirlo continuamente en todos los sistemas de conjugados y claramente, en una aplicación conveniente de manera conveniente, para mostrar Pantallas y pantallas, y si es necesario, registrarse.
El procesamiento de señal digital permitió a los sistemas de ubicación pasiva submarina para determinar solo el ruido del portador y la distancia a ella.
Finalmente, la integración de varios sistemas basados \u200b\u200ben el control simplificado por computadora sobre el trabajo y el mantenimiento del gas y permitió reducir al personal de servicio, lo que es importante para el disco-pequeño relativamente pequeño de los submarinos diesel.
El tracto principal de la estación acústica es la falta de ruido con un rango de varias decenas de kilómetros. En la baja frecuencia (220 Hz - 7 kHz), el rango de recepción de la señal se produce en un conformio (combinado con las partes del cuerpo de la carcasa) una antena acústica que consiste en hidrófonos piezocerámicos, y en alta frecuencia (8 kHz) - en una Antena cilíndrica con hidrófonos de zirconato principal, colocado cerca de Kiel. La antena cilíndrica también sirve para rastrear varios objetivos (hasta cuatro). Tanto los canales de redundancia de ruido se complementan entre sí. El espacio circundante se pasa por alto por un rápido encuesta consistente de un gran número de pétalos formados estáticamente de la orientación direccional. Detectó objetivos ruidosos que se desconectan con un método equivalente de alta precisión.
El tracto activo hizo posible realizar una revisión circular con la radiación omnidireccional de una parcela o cuando la serie de parcelas cambiaban secuencialmente las instrucciones, así como emiten parcelas individuales en una dirección específica. Las señales de eco aceptadas se muestran en la pantalla indicadora y se pueden grabar para medir el cambio de frecuencia Doppler.
El camino de la ubicación pasiva tiene tres antenas receptoras, se instalaron enjuague con la carcasa en el nasal, medio y a popa, por cada lado del submarino. Toman objetivos de ruido que están sujetos al procesamiento de correlación, lo que hace posible determinar el lugar del objetivo para tres líneas de posición con suficiente precisión. Las antenas de la ruta se pueden usar como una eliminación adicional de ruido para la ruta.
La estación proporciona comunicaciones dirigidas y sin sonido no direccionales.
La trayectoria de detección de señales de los hidróliadores le permite detectar señales de pulso de varios orígenes a una distancia de varias decenas de kilómetros, determinar su frecuencia, duración y dirección a la fuente de la señal.
En la construcción de la estación, los circuitos integrados se usan ampliamente, debido a que se reducen sus dimensiones y peso, se incrementa la confiabilidad. Los datos sobre los objetivos se muestran en dos pantallas, vaya automáticamente al automático AUM de un sistema de disparo de torpedo donde se producen comandos para disparar.
Se ha desarrollado una estación hidroacústica más simple. Incluye caminos de risa, ecos y ubicación pasiva. La búsqueda y la detección de metas se realizan en modo de risa utilizando el método de corrección del método de procesamiento de señales. Una vez detectado el propósito, la distancia a la misma se mide por radiación de la parcela única direccional o el método de ubicación pasiva.
Para aumentar la eficiencia de usar herramientas de observación hidroacústica en submarinos, los instrumentos también tienen dispositivos para medir la velocidad de la propagación de sonido en el agua y para la señalización sobre el comienzo de la aparición de cavitación de tornillos de remo, dispositivos para controlar el nivel de ruido propio .
Para aumentar la eficiencia del uso del gas, hay un dispositivo para construir pinturas radiales de acuerdo con los datos de entrada en la distribución real de la velocidad de propagación del sonido con la profundidad creciente. El sistema es capaz de funcionar en el modo Simulador con la simulación de señales que ingresan su entrada de varios propósitos. Toda la información actual celebrada en el sistema en el proceso de su trabajo de combate y producido por ella se puede registrar para la reproducción y el análisis posterior. El sistema es servido por uno o dos operadores.
El gas de otros tipos tiene antenas particionadas cilíndricas. Para una visión circular, 96 pétalos del patrón de radiación están formados estáticamente.
La determinación de las coordenadas de los objetivos detectados y el seguimiento simultáneamente se lleva a cabo en todos los modos utilizando una computadora. En el modo activo, para obtener un rango máximo de acción, se proporciona para la coordinación de los parámetros de radiación (potencia emitida, frecuencia, tipo de modulación de la parcela) con condiciones hidrológicas reales en el área de observación.
En el modo de detección de señales. Los hidrolocadores se determinan por el rodamiento en la fuente de la señal, su frecuencia y amplitud, la duración de los pulsos, la frecuencia de su seguimiento y clasifica las fuentes de radiación a lo largo de la totalidad de todas estas características.
La estación también puede funcionar en los modos auxiliar: simulador, inserción y control automático de la condición técnica que garantiza la detección de módulos defectuosos.
Todos los controles y dos pantallas se encuentran en la consola de gas. En uno de ellos con una indicación tricolora, que representa un indicador de revisión circular, se muestra simultáneamente en la parte central. Ajuste completo con su barco en el centro y cuentas circulares, y en los bordes - completa información de texto En los objetivos acompañados (distancias, delers, los valores de los cambios de Doppler, cursos, velocidades), datos sobre el curso y la velocidad de su barco, sobre el modo y los parámetros del funcionamiento del gas. Los matrices jerárquicos del texto se muestran en la segunda pantalla, cuyo procesamiento le permite optimizar el proceso de control del equipo. Dicha presentación de la información simplifica significativamente el servicio y el funcionamiento de la estación y le permite realizarlo a un operador.
En noviembre de 1983, el APL de Victor-III recibió una tarea para eliminar el ruido y otras características del cuarto cohete de tipo de Ohio Americano.
Según la tripulación, el joven capitán ambicioso de nuestro submarino, inspirado en ejemplos de los héroes submarinos. Guerra patriótica, Decidí casi ir a la bahía de la base de sugostat.
Para el disfraz acústico, el K-324 en el mar Sargasso subió bajo una pequeña nave, que siguió al curso apropiado. Todo salió bien, tan repentinamente la velocidad de nuestro pl. Comenzó a caer rápidamente, a pesar del aumento de la turbina se vuelve máximo.
Sin desencadenamiento y adivinanzas de la tripulación a resultados positivos llevados: la velocidad cayó a tres nodos.
Podemos hacer cualquier cosa, tuve que flotar. Aparecerse casi en mente los bancos estadounidenses, en la "guarida", por así decirlo.
Para la inspección del tornillo principal, los tanques nasales se llenaron, el barco adquirió un diferencial decente en la nariz y un equipo de emergencia, armado con dos "Kalashnikov" y dos PM (todo el arsenal existente en el submarino soviético) examinó la alimentación parte. Por lo tanto, es, un cable resultó que se enrollará en el eje, muy duradero, sin dejar, ni las colas automáticas: todos los esfuerzos eran vanos.
El Comandante aceptó la decisión, para ir a Cuba en una posición nocturna. Entonces fue ella y capturó pilotos americanos, marineros y turistas en yate de placer.
Con un dolor por la mitad a Cuba, Delzli. El comandante inmediatamente llamó a la "alfombra". Pero, contrariamente a las tristes suposiciones sobre su destino, el capitán "a caballo" regresó, se devolvió el capitán en el tornillo por el submarinista desesperado, resultó ser nada más que la más nueva antena hidroacústica estadounidense que los estadounidenses descuidados fueron examinados en un barco desagradable.
Nuestros científicos y tecnólogos recibieron materiales invaluables para explorar ...

Emergencia PL K-324 en el mar Sargasso
Desde el libro de batalla para Stars-2. Confrontación de espacio (Parte II) Autor Perhearsh anton ivanovichComplejos orbitales de combate para "Burana", recordamos que el complejo espacial de Energy-Buran y el espacio espacial se creó a petición del Ministerio de Defensa para resolver problemas militares en el espacio cercano. Está claro que, a la vez, las cargas complejas se desarrollaron con el complejo para
De la gestión de la calidad del libro. Autor Shevchuk denis aleksandrovich1.2. La gestión de la calidad es un factor en el éxito de la empresa en la lucha competitiva, la economía de mercado, ya que una de las características más importantes incluye la competencia entre los sujetos y los objetos del mercado. Bajo la competencia entiende la rivalidad entre individuos o
Desde el libro, los barcos marciales del mundo a la vuelta de los siglos XX - XXI, Frigates Parte III Autor APALKOV YURI ValentinovichEE.UU. Anti-Aircraft Missile Systems Compositor and Main TTX "Estándar * SM-1" Estándar "SM-2 MK 57 OTAN" Sea Sparrow "" Sea Chapparel "Developer Weave USA General Dinamics Corporation, División de Defensa Aérea USA General Dinamics Corporation, Defensa Aérea División de EE.UU. Sistemas electrónicos de la OTAN RayTheon, Hughes Missile Systems Company USA Lockheed Martin Aeronutronic
Desde el libro soviet diesel-eléctrico submarinos de construcción de posguerra. Autor Gagin vladimir vladimirovichComplejos de misiles anti-submarinos Composición y principal TTX "Malel" "Floor-B" "Cascada" "Medveda" Asroc Cy-1 Millastrance Firma de Rusia Raduboga Rusia "Novator" Rusia "MirtePlyekheni-KA" US Lockheed Martin Tactical Defense Systems China CMTIEC adopción gie milas
Desde el libro. Armas de cohete doméstico Autor Primero, Mikhail AndreevichAlgunos aspectos de las fuerzas submarinas de la lucha contra el submarino después de la Segunda Guerra Mundial han sufrido cambios cualitativos fundamentales. Los submarinos se volvieron de buceo en buques verdaderamente submarinos, autonomía, profundidad de inmersión, velocidad y rango
Desde el libro. Complejos domésticos antitanques. Autor Angel Rostislav DmitrievichSistemas de misiles anti-Aircraft Land R-101R -101 (P-102) Experiencias anti-Aircraft Controled Rocket. Equipado con alivio. Diseñado en la segunda mitad de los años 40. En NII-88 basado en el misil antiaéreo del trofeo alemán "Wasserfal". Las pruebas tuvieron lugar en 1948. Jefe de diseñador - Eugene
Desde el libro, los autos secretos del ejército soviético. Autor Kochnev evgeniy dmitrievichSistemas de misiles anti-Aircraft de mar B-753 "Volkhov" M-2. B-753 (13DM) Un complejo de misiles antiaéreo marino experimental M-2 con un cohete controlado de dos pasos equipado con Marshus EDD y que inicia RDTT. Creado sobre la base de la tierra S-75 SPC. Desarrollador complejo - CKB
Desde la aviación del libro en las guerras locales. por babich v.k.Sistemas de misiles anti-Aircraft portátil "Aguja" (Fotos de la revista "Desfile militar") "STRELA-2" "STRELAA-2M" "STRELA-2" 9k32. 9M32 Portátil Anti-Aircraft Missile Complex 9k32 con un cohete de combustible de combustible sólido controlado. El primer SPC portátil doméstico. Diseñado
Desde libros de homemakers electrónicos por Kashkarov A. P.Complejos anti-misiles A. Sistema B-1000OPED (POLIGON) de defensa anti-misiles "A" con una defensa de misiles en 1000. El primer sistema doméstico pro. Fue desplegado en el polígono Sarah Shagan. Proporcionó la derrota de un solo misil balístico monobloque de rango medio.
Del siglo de metal. Autor Nikolaev grigory ilyichLos complejos antitanques de la segunda generación "FAGOT" adoptados en 1963, el complejo antitanque de Maltka respondió principalmente a los requisitos de las tropas y en el futuro, se comprobó positivamente como un arma efectiva durante las guerras locales. Sin embargo, y
Desde la evolución del libro de los sistemas antiparinos de buques domésticos. por Kazakin Leonid.Los sistemas de misiles anti-tanquees de los años noventa a mediados de los años ochenta, junto con el trabajo en la modernización de los complejos antitanques creados anteriormente, dirigidos principalmente a garantizar la posibilidad de derrotar a los fines modernos con elevado
Del libro del autor.Los complejos de misiles y artillería móviles El primer lanzador del BR-264 para el montaje en el chasis del automóvil se creó en la planta de barricada en septiembre de 1961 y formó parte de la "temperatura" experimental PCC 9K71 con un cohete de combustible sólido 9M71, que se desarrolló con
Del libro del autor.3. En la lucha por la supervivencia en las guerras locales, como se señaló, la tasa de supervivencia fue evaluada por expertos extranjeros en términos de pérdida, la proporción del número de aeronaves derribados a la cantidad de salidas de aviones dispuestas. Por ejemplo, el nivel de pérdida de escuadrilla táctica,
Del libro del autor.4.8.2. Técnicas efectivas Cuando se trata de interferencias en la lucha contra el ruido, caminando por la línea, es mejor combinar filtros y supresores lineales de RF procesos transitorios en línea corriente alterna. Este método se puede lograr mediante 60 dB de interferencia a frecuencias para
Del libro del autor.Capítulo 1. En la lucha contra la corrosión de la ciencia de los metales en el mundo no hay nada eterno, todos saben esta simple verdad durante mucho tiempo. Lo que parece para siempre es inquebrantable: montañas, bloques de granito, continentes enteros, - eventualmente destruidos, dispersos en polvo, van bajo el agua, caen en profundidades.
Del libro del autor.Los complejos de cohetes anti-submarinos ya se han mencionado, con la aparición de submarinos nucleares en la década de 1950, se requerían nuevos sistemas de armas, capaces de alcanzar objetivos submarinos en un gran rango. En la URSS, el trabajo en esta dirección se inició de acuerdo con
Principios de la construcción de complejos y sistemas hidroacústicos activos. Asunto: Preguntas: 1) Principios de la construcción de gases activos 2) Principios para la construcción de un gas de comunicación e identificación 3) Principios de la construcción de gas Minizistories objetivo Propósito: 1. Para estudiar los principios de construir el gas activo 2. Examine los principios del trabajo en los esquemas estructurales de GUS activos II. Objetivo educativo 1. Activación de actividades cognitivas de cadetes. 2. Formación de cadetes de habilidades módicas de comandos (KMN) y habilidades educativas (NVR). uno
 LITERATURA: 1. Estándares estatales URSS y la Federación Rusa. GOST 2. un sistema Documentación de diseño (ECCD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Nave Hydroacústica Maquinaria: Condición y problemas reales. - San Petersburgo. : Ciencia, 2004. - 410 s. 177 IL. 4. I. V. SOLOVYOV, G. N. KOROLKOV, A. A. A. BARANGENKO Y OTROS. MAR RADIO ELECTRONICA: Directorio. - San Petersburgo. : Politécnico, 2003. - 246 p. : ILLINOIS. 5. G. I. Kazantsev, G. G. Kotov, V. B. Lokshin et al. Hydoracia tutorial. - M.: Militar. Editar. 1993. 230 s. Illinois. 2.
LITERATURA: 1. Estándares estatales URSS y la Federación Rusa. GOST 2. un sistema Documentación de diseño (ECCD) 3. Yu. A. Koryakin, S. A. Smirnov, G. V. Yakovlev. Nave Hydroacústica Maquinaria: Condición y problemas reales. - San Petersburgo. : Ciencia, 2004. - 410 s. 177 IL. 4. I. V. SOLOVYOV, G. N. KOROLKOV, A. A. A. BARANGENKO Y OTROS. MAR RADIO ELECTRONICA: Directorio. - San Petersburgo. : Politécnico, 2003. - 246 p. : ILLINOIS. 5. G. I. Kazantsev, G. G. Kotov, V. B. Lokshin et al. Hydoracia tutorial. - M.: Militar. Editar. 1993. 230 s. Illinois. 2.
 Dependiendo del método de obtener información hidroacústica (de acuerdo con el método de uso de la energía), los sistemas hidroacústicos se dividen en sistemas hidroacústicos activos a) Sistemas hidroacústicos pasivos. Sistema hidroacústico (medio): un dispositivo que forma y emite señales hidroacústicas en el acuático. El medio ambiente y en las fronteras de su partición, acepta señales reflejadas o emitidas de objetos submarinos y superficiales. Términos equivalentes activos sistema hidroacústico - hidrolección activa, eliminación de eco, ubicación de eco o hidrolocidad solo).
Dependiendo del método de obtener información hidroacústica (de acuerdo con el método de uso de la energía), los sistemas hidroacústicos se dividen en sistemas hidroacústicos activos a) Sistemas hidroacústicos pasivos. Sistema hidroacústico (medio): un dispositivo que forma y emite señales hidroacústicas en el acuático. El medio ambiente y en las fronteras de su partición, acepta señales reflejadas o emitidas de objetos submarinos y superficiales. Términos equivalentes activos sistema hidroacústico - hidrolección activa, eliminación de eco, ubicación de eco o hidrolocidad solo).
 La hidrolección activa es un método para detectar y determinar las propiedades de los objetos subacuáticos basados \u200b\u200ben la radiación de las señales hidroacústicas en un medio acuoso, así como la recepción y el procesamiento de señales de ECHO, que surgen como resultado de la reflexión (o dispersión) de acústica. Olas de objetos subacuáticos. Los medios hidroacústicos (sistemas) que proporcionan hidrolíticos activos se denominan hidrólicos hidrolocadores, estaciones de hidrógeno (GLS) o rutas de hidrólerio (CH), rutas de eliminación de eco (EP) y mediciones de distancia (ID) para gas. Por lo general, bajo los sistemas de comprender GLAS destinados a detectar y medir la distancia a PL y otros objetos subacuáticos importantes
La hidrolección activa es un método para detectar y determinar las propiedades de los objetos subacuáticos basados \u200b\u200ben la radiación de las señales hidroacústicas en un medio acuoso, así como la recepción y el procesamiento de señales de ECHO, que surgen como resultado de la reflexión (o dispersión) de acústica. Olas de objetos subacuáticos. Los medios hidroacústicos (sistemas) que proporcionan hidrolíticos activos se denominan hidrólicos hidrolocadores, estaciones de hidrógeno (GLS) o rutas de hidrólerio (CH), rutas de eliminación de eco (EP) y mediciones de distancia (ID) para gas. Por lo general, bajo los sistemas de comprender GLAS destinados a detectar y medir la distancia a PL y otros objetos subacuáticos importantes

 El esquema que refleja el principio de detección y determinación de la distancia al objetivo al objetivo de la recepción de la señal de radiación G / A reflejada G / A de señal D \u003d CT / 2 Reflexión G / A señal
El esquema que refleja el principio de detección y determinación de la distancia al objetivo al objetivo de la recepción de la señal de radiación G / A reflejada G / A de señal D \u003d CT / 2 Reflexión G / A señal
 R Transmitir tracto (generador) A D Pulse Sistema de inicio del sistema Sistema de sistema Sistema de sincronización del sistema Pulse B en el sistema de suministro de energía A B C D E E Formación de dispositivos Características de la formación de antena TRABO REMOTO (dispositivo de recepción) E Distancia D \u003d (C · t) / 2 Radiación acústica de la recepción Antena acústica
R Transmitir tracto (generador) A D Pulse Sistema de inicio del sistema Sistema de sistema Sistema de sincronización del sistema Pulse B en el sistema de suministro de energía A B C D E E Formación de dispositivos Características de la formación de antena TRABO REMOTO (dispositivo de recepción) E Distancia D \u003d (C · t) / 2 Radiación acústica de la recepción Antena acústica

 La antena acústica (AA) está diseñada para convertir la energía eléctrica en acústica y espalda. Los dispositivos de entrada se utilizan para mejorar previamente las señales recibidas, así como para cambiar la antena acústica con los dispositivos generadores y receptores. El generador forma pulsos de radiación con parámetros especificados. Los canales de trayectoria de detección receptora resuelven problemas de detección de objetos subacuáticos y una definición aproximada de sus coordenadas. Los canales de coordenadas están diseñados para definición precisa Coordenadas de objetos subacuáticos, seguido de emitiéndolos al sistema de control de armas.
La antena acústica (AA) está diseñada para convertir la energía eléctrica en acústica y espalda. Los dispositivos de entrada se utilizan para mejorar previamente las señales recibidas, así como para cambiar la antena acústica con los dispositivos generadores y receptores. El generador forma pulsos de radiación con parámetros especificados. Los canales de trayectoria de detección receptora resuelven problemas de detección de objetos subacuáticos y una definición aproximada de sus coordenadas. Los canales de coordenadas están diseñados para definición precisa Coordenadas de objetos subacuáticos, seguido de emitiéndolos al sistema de control de armas.
 Los sistemas de soporte semiautomático de los objetivos permiten realizar soporte para objetivos en modo semiautomático con eliminación automática de coordenadas actuales. El canal de escucha hace posible escuchar las señales de rumores recibidas para la clasificación del contacto hidroacústico con la meta. El sistema de visualización es un dispositivo de salida y es necesario para la visualización visual de la información recibida y eliminar los datos de destino. El sistema de gestión y sincronización es un enlace entre todos los dispositivos y los sistemas GLS.
Los sistemas de soporte semiautomático de los objetivos permiten realizar soporte para objetivos en modo semiautomático con eliminación automática de coordenadas actuales. El canal de escucha hace posible escuchar las señales de rumores recibidas para la clasificación del contacto hidroacústico con la meta. El sistema de visualización es un dispositivo de salida y es necesario para la visualización visual de la información recibida y eliminar los datos de destino. El sistema de gestión y sincronización es un enlace entre todos los dispositivos y los sistemas GLS.
 El dispositivo de capacitación incorporado (VUCU) está destinado a desarrollar las habilidades del operador por parte del objetivo, así como las habilidades en la gestión de GLS en varios modos. El sistema de control automático incorporado (ACC) le permite monitorear los principales parámetros técnicos de la GLS, para identificar sus fallas. El GLS se incluye en la operación proporcionando los voltajes de suministro a todos los dispositivos, para esto, la estación tiene un escudo de distribución en el que se muestra el sistema de control del sistema de alimentación.
El dispositivo de capacitación incorporado (VUCU) está destinado a desarrollar las habilidades del operador por parte del objetivo, así como las habilidades en la gestión de GLS en varios modos. El sistema de control automático incorporado (ACC) le permite monitorear los principales parámetros técnicos de la GLS, para identificar sus fallas. El GLS se incluye en la operación proporcionando los voltajes de suministro a todos los dispositivos, para esto, la estación tiene un escudo de distribución en el que se muestra el sistema de control del sistema de alimentación.
 Según el método de revisión del área de agua de la Revisión Circular (KO) 360 Revisión del sector (CO) 25 0 Revisión de la reunión (SHO) 0 360 Sector Sectorial Revisión (SSHO) 0 120 A AA 0 AA 120 0 120 AA 120 0 0
Según el método de revisión del área de agua de la Revisión Circular (KO) 360 Revisión del sector (CO) 25 0 Revisión de la reunión (SHO) 0 360 Sector Sectorial Revisión (SSHO) 0 120 A AA 0 AA 120 0 120 AA 120 0 0


 Higo. 4. Vista del indicador con un arroz de escaneo en espiral. 9. Ver marcas de objetivos en el indicador con un arroz de escaneo de línea. 5. Vista del indicador con un arroz de escaneo de línea. 10. Vista del indicador con campanas y distancias.
Higo. 4. Vista del indicador con un arroz de escaneo en espiral. 9. Ver marcas de objetivos en el indicador con un arroz de escaneo de línea. 5. Vista del indicador con un arroz de escaneo de línea. 10. Vista del indicador con campanas y distancias.



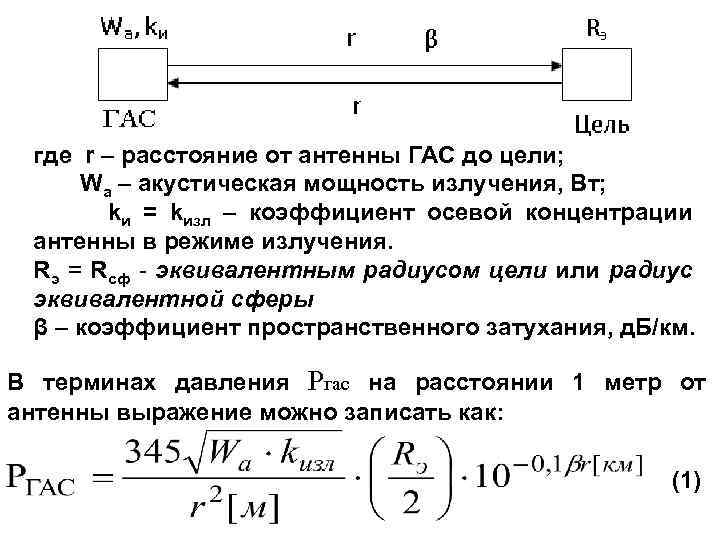 donde R es la distancia de la antena de gas al objetivo; WA es el poder acústico de la radiación, W; Ki \u003d kizl: el coeficiente de concentración axial de la antena en modo de radiación. Re \u003d RSF - Radio o radio objetivo equivalente de la esfera equivalente β es el coeficiente de atenuación espacial, d. B / km. En términos de presión de RGAS a una distancia de 1 metro de la antena, la expresión se puede escribir como: (1)
donde R es la distancia de la antena de gas al objetivo; WA es el poder acústico de la radiación, W; Ki \u003d kizl: el coeficiente de concentración axial de la antena en modo de radiación. Re \u003d RSF - Radio o radio objetivo equivalente de la esfera equivalente β es el coeficiente de atenuación espacial, d. B / km. En términos de presión de RGAS a una distancia de 1 metro de la antena, la expresión se puede escribir como: (1)
 Definimos el nivel de una señal de eco del objetivo en relación con el nivel cero P 0, utilizando la relación (1) y la prolocula con un algoritmo decimal: introducimos la notación: - el nivel de la señal de eco en el punto de la arreglo de la antena de gas, en la d. b; - nivel de radiación, en d. b; - Este es el valor expresado en la d. B y caracterizando la reflectividad del objeto.
Definimos el nivel de una señal de eco del objetivo en relación con el nivel cero P 0, utilizando la relación (1) y la prolocula con un algoritmo decimal: introducimos la notación: - el nivel de la señal de eco en el punto de la arreglo de la antena de gas, en la d. b; - nivel de radiación, en d. b; - Este es el valor expresado en la d. B y caracterizando la reflectividad del objeto.
 PR - Pérdidas estándar en la propagación, en d. B, teniendo en cuenta el debilitamiento de la señal cuando se propaga de la antena del gas al objetivo y la espalda teniendo en cuenta la ley esférica de la distribución. Teniendo en cuenta las designaciones introducidas, la expresión toma la forma: las NGAS \u003d UI + CC - 2 PR (2) de fórmula (2) se usa para estimar el nivel de la señal de eco del objetivo en el punto de recepción en un homogéneo ilimitado Medio ambiente sin interferencia.
PR - Pérdidas estándar en la propagación, en d. B, teniendo en cuenta el debilitamiento de la señal cuando se propaga de la antena del gas al objetivo y la espalda teniendo en cuenta la ley esférica de la distribución. Teniendo en cuenta las designaciones introducidas, la expresión toma la forma: las NGAS \u003d UI + CC - 2 PR (2) de fórmula (2) se usa para estimar el nivel de la señal de eco del objetivo en el punto de recepción en un homogéneo ilimitado Medio ambiente sin interferencia.
 Teniendo en cuenta el procesamiento de la señal de utilidad de RGAS \u003d PC e interferencia con RP en gas, y considerando el coeficiente de reconocimiento Δ, puede registrar la siguiente expresión de la ecuación de rango de energía RGAS \u003d PC \u003d Δ RP del modo CH (EE): \u003d donde k es el coeficiente de concentración axial de la antena; ΔF - banda de frecuencia (rango) del camino de la recepción de gas, Hz; F 0 es la frecuencia promedio del rango, a. Hz; β \u003d 0, 036 F 03/2 [A. Hz] - Coeficiente de atenuación espacial, d. B / km.
Teniendo en cuenta el procesamiento de la señal de utilidad de RGAS \u003d PC e interferencia con RP en gas, y considerando el coeficiente de reconocimiento Δ, puede registrar la siguiente expresión de la ecuación de rango de energía RGAS \u003d PC \u003d Δ RP del modo CH (EE): \u003d donde k es el coeficiente de concentración axial de la antena; ΔF - banda de frecuencia (rango) del camino de la recepción de gas, Hz; F 0 es la frecuencia promedio del rango, a. Hz; β \u003d 0, 036 F 03/2 [A. Hz] - Coeficiente de atenuación espacial, d. B / km.
 Gas en PN Antenna Gas UI PR SK UP POP OND Englic Ajuste Right Rentive de la carga de Cha (EP) En forma simbólica, se puede registrar (teniendo en cuenta el signo "-") como: EP \u003d - (UI + SC - SC - SC - SC - SC - UP - UP-UP - PO + PN) \u003d 2 PR EP \u003d UE (nivel de interferencia) \u003d
Gas en PN Antenna Gas UI PR SK UP POP OND Englic Ajuste Right Rentive de la carga de Cha (EP) En forma simbólica, se puede registrar (teniendo en cuenta el signo "-") como: EP \u003d - (UI + SC - SC - SC - SC - SC - UP - UP-UP - PO + PN) \u003d 2 PR EP \u003d UE (nivel de interferencia) \u003d
 Software (umbral de detección) \u003d MON (indicador de dirección) \u003d gas activo: - Mediciones de la distancia de gas - Comunicación de gas - Gas IMIFICIAL - Ministencia de gas - Gas de gases Torped - Gases de desembagados y gases adicionales - Hydroacústico Lags - Revisión del lado del gas
Software (umbral de detección) \u003d MON (indicador de dirección) \u003d gas activo: - Mediciones de la distancia de gas - Comunicación de gas - Gas IMIFICIAL - Ministencia de gas - Gas de gases Torped - Gases de desembagados y gases adicionales - Hydroacústico Lags - Revisión del lado del gas

 El armamento hidroacústico de la NK consiste en: Øgak MGK-335 "Platinum": un complejo hidroacústico de detección, focalización y comunicación; Øgak MGK-345 "Bronce": un complejo hidroacústico de detección, focalización y comunicaciones; Øgak MGK-355 "Polynom" es un complejo hidroacústico de detección de la PL y la emisión de la designación objetivo de los brazos anti-submarinos; Ø Etiquetas MG-332 "ARGUN", GAS MG-332 T "ARGUN-T" - Una estación hidroacústica de detección y focalización de buques antiguos; Ø Etiquetas MG-329 "OKA", GAS MG-329 M "OKA-M" - Una estación hidroacústica bajada; Ø Etiquetas MG-339 "STONMON" o GAS MG-339 T "Schend-T": una estación de detección hidroacústica, determinación de coordenadas, comunicación e identificación;
El armamento hidroacústico de la NK consiste en: Øgak MGK-335 "Platinum": un complejo hidroacústico de detección, focalización y comunicación; Øgak MGK-345 "Bronce": un complejo hidroacústico de detección, focalización y comunicaciones; Øgak MGK-355 "Polynom" es un complejo hidroacústico de detección de la PL y la emisión de la designación objetivo de los brazos anti-submarinos; Ø Etiquetas MG-332 "ARGUN", GAS MG-332 T "ARGUN-T" - Una estación hidroacústica de detección y focalización de buques antiguos; Ø Etiquetas MG-329 "OKA", GAS MG-329 M "OKA-M" - Una estación hidroacústica bajada; Ø Etiquetas MG-339 "STONMON" o GAS MG-339 T "Schend-T": una estación de detección hidroacústica, determinación de coordenadas, comunicación e identificación;
 Ø Etiquetas MG-79 o GAS MG-89 "Sulna": una estación hidroacuática de detección de minas de anclaje y fondo; Ø Etiquetas MG-7 "Pulsera" y Gas MG-737 "Amuleto-3": una estación hidroacústica de descubrimiento de las fuerzas y medios submarinos de sabotaje. ØGAS MG-26 "HOST" o GAS MG-45 "Backgammon" - Equipos hidroacústicos e identificados. Ø Etiquetas KMG-12 "Cassandra": el instrumento de clasificación de objetivos para estaciones hidroacústicas de buques de superficie cuando trabajan en modo activo. Ø Etiquetas MG-409 C es un sistema de detección pasiva del bono hidroacústico. Ø Etiquetas "Altyn": equipo para medir la distribución vertical de la velocidad de sonido en agua de la nave de la superficie; ØGAS MI-110 KM - El instrumento de detección del rastro de retención del APL.
Ø Etiquetas MG-79 o GAS MG-89 "Sulna": una estación hidroacuática de detección de minas de anclaje y fondo; Ø Etiquetas MG-7 "Pulsera" y Gas MG-737 "Amuleto-3": una estación hidroacústica de descubrimiento de las fuerzas y medios submarinos de sabotaje. ØGAS MG-26 "HOST" o GAS MG-45 "Backgammon" - Equipos hidroacústicos e identificados. Ø Etiquetas KMG-12 "Cassandra": el instrumento de clasificación de objetivos para estaciones hidroacústicas de buques de superficie cuando trabajan en modo activo. Ø Etiquetas MG-409 C es un sistema de detección pasiva del bono hidroacústico. Ø Etiquetas "Altyn": equipo para medir la distribución vertical de la velocidad de sonido en agua de la nave de la superficie; ØGAS MI-110 KM - El instrumento de detección del rastro de retención del APL.
 Higo. 1. Proyecto Rocket Cruiser 1164 en servicio del proyecto 1164 Armas hidroacústicas: Q GAK MGK-335 "Platinum"; Q MG-7 "Pulsera": 2 juegos; Q Gas MG-737 "Amuleto-3"; Q Gas KMG-12 "Cassandra". Hay lo siguiente
Higo. 1. Proyecto Rocket Cruiser 1164 en servicio del proyecto 1164 Armas hidroacústicas: Q GAK MGK-335 "Platinum"; Q MG-7 "Pulsera": 2 juegos; Q Gas MG-737 "Amuleto-3"; Q Gas KMG-12 "Cassandra". Hay lo siguiente
 Higo. 2. Gran barco anti-submarino del proyecto 1155 (1155. 1) El siguiente armamento hidroacústico está en servicio con el Proyecto 1155: GAK MGK-335 "Platinum"; Gas MG-7 "Pulsera" - 2 sets; Gus "Altyn"; Gas MI-110 km. Al servicio del proyecto 1155. 1 es las siguientes armas hidroacústicas: GAK MGK-355 "Polin"; Gas MG-7 "Pulsera" - 2 sets; Gus "Altyn"; Gas MI-110 km.
Higo. 2. Gran barco anti-submarino del proyecto 1155 (1155. 1) El siguiente armamento hidroacústico está en servicio con el Proyecto 1155: GAK MGK-335 "Platinum"; Gas MG-7 "Pulsera" - 2 sets; Gus "Altyn"; Gas MI-110 km. Al servicio del proyecto 1155. 1 es las siguientes armas hidroacústicas: GAK MGK-355 "Polin"; Gas MG-7 "Pulsera" - 2 sets; Gus "Altyn"; Gas MI-110 km.
 Higo. 3. Buque de proyectos 956. Clase: barco de artillería de cohete, subclase: misión escuadrada. 1 Rango al servicio del proyecto 956 es las siguientes armas hidroacústicas: GAK MGK-355 "Polin"; Gas MG-7 "Pulsera" - 2 sets; Gas KMG-12 "Cassandra".
Higo. 3. Buque de proyectos 956. Clase: barco de artillería de cohete, subclase: misión escuadrada. 1 Rango al servicio del proyecto 956 es las siguientes armas hidroacústicas: GAK MGK-355 "Polin"; Gas MG-7 "Pulsera" - 2 sets; Gas KMG-12 "Cassandra".
 Higo. 4. Project Rocket Boat 1241. 2 al servicio del proyecto 1241. 2 Hay las siguientes armas hidroacústicas: GAK MGK-345 "Bronce"; Gas MG-45 "Backgammon";
Higo. 4. Project Rocket Boat 1241. 2 al servicio del proyecto 1241. 2 Hay las siguientes armas hidroacústicas: GAK MGK-345 "Bronce"; Gas MG-45 "Backgammon";
 Higo. 5. Barco torpedic del proyecto 1241 al servicio del proyecto 1241 es la siguiente arma hidroacústica: GAK MGK-345 "Bronce"; Gas MG-45 "Backgammon";
Higo. 5. Barco torpedic del proyecto 1241 al servicio del proyecto 1241 es la siguiente arma hidroacústica: GAK MGK-345 "Bronce"; Gas MG-45 "Backgammon";
 Higo. 6. Pequeño nave anti-submarino del proyecto 1124 al servicio del proyecto 1124 Existe las siguientes armas hidroacústicas: Gas MG-339 "STONMON" o GAS MG-339 T "Schend-T"; Algunos proyectos están armados con GAC MGK-335 "Platinum"; Gas MG-322 "Argun" o Gas MG-322 T "ARGUN-T"; Gas MG-329 "OKA" o GAS MG-329 M "OKA-M"; Gas MG-26 "Host" o Gas MG-45 "Backgammon"; Gas KMG-12 "Cassandra". Gas MG-409 S.
Higo. 6. Pequeño nave anti-submarino del proyecto 1124 al servicio del proyecto 1124 Existe las siguientes armas hidroacústicas: Gas MG-339 "STONMON" o GAS MG-339 T "Schend-T"; Algunos proyectos están armados con GAC MGK-335 "Platinum"; Gas MG-322 "Argun" o Gas MG-322 T "ARGUN-T"; Gas MG-329 "OKA" o GAS MG-329 M "OKA-M"; Gas MG-26 "Host" o Gas MG-45 "Backgammon"; Gas KMG-12 "Cassandra". Gas MG-409 S.
 Higo. 7. Proyecto BSQUES BASIC TRAILER BTSCH 1265 (AVE. 260, 270) Al servicio del proyecto 1265 contiene las siguientes armas hidroacústicas: Gas MG-79 o GAS MG-89 "Sulna"; Gus "Kabarga";
Higo. 7. Proyecto BSQUES BASIC TRAILER BTSCH 1265 (AVE. 260, 270) Al servicio del proyecto 1265 contiene las siguientes armas hidroacústicas: Gas MG-79 o GAS MG-89 "Sulna"; Gus "Kabarga";
 Higo. 8. Una gran nave de aterrizaje del proyecto del Proyecto 775 775 al servicio del Proyecto 775 es la siguiente arma hidroacústica: Gas MG-7 "Pulsera"; Gas MG-26 "HOST" o GAS MG-45 "Backgammon".
Higo. 8. Una gran nave de aterrizaje del proyecto del Proyecto 775 775 al servicio del Proyecto 775 es la siguiente arma hidroacústica: Gas MG-7 "Pulsera"; Gas MG-26 "HOST" o GAS MG-45 "Backgammon".
 ESTACIONES HYDROACUSTICAS "TAMIR-11" (1953) Gas para buques de superficie de pequeños desplazamientos El número total de dispositivos - 17 Masa de los instrumentos - 1000 kg. Jefe de diseñador Vovochnoe B. N.
ESTACIONES HYDROACUSTICAS "TAMIR-11" (1953) Gas para buques de superficie de pequeños desplazamientos El número total de dispositivos - 17 Masa de los instrumentos - 1000 kg. Jefe de diseñador Vovochnoe B. N.
 HERCULAS HYDROACUSTICES (1957) Gas para buques superficiales de desplazamiento medio y grande. Número total de dispositivos - 30 MASA DE INSTRUMENTOS - 5800 KG Jefe Designer Umikov Z.N.
HERCULAS HYDROACUSTICES (1957) Gas para buques superficiales de desplazamiento medio y grande. Número total de dispositivos - 30 MASA DE INSTRUMENTOS - 5800 KG Jefe Designer Umikov Z.N.
 Estaciones hidroacústicas "Mezen-2" (1963) Detección de gas de fondo min. Número total de dispositivos Masa de instrumentos - 12 - 2100 Kg Jefe Designer Low Novo I. I.
Estaciones hidroacústicas "Mezen-2" (1963) Detección de gas de fondo min. Número total de dispositivos Masa de instrumentos - 12 - 2100 Kg Jefe Designer Low Novo I. I.
 Estaciones hidroacústicas "Kashalot" (1963) Gas para la búsqueda de buques hundidos El número total de instrumentos - 22 Masa de los instrumentos - 4000 kg (sin cremallera) Jefe de diseñador Timokov N. A. A. A.
Estaciones hidroacústicas "Kashalot" (1963) Gas para la búsqueda de buques hundidos El número total de instrumentos - 22 Masa de los instrumentos - 4000 kg (sin cremallera) Jefe de diseñador Timokov N. A. A. A.
 Complejos hidroacústicos "Rubin" (1964) GAK para suministro de submarinos multipropósito Ayalashka E. I. Número total de dispositivos - 56 Masa de instrumentos - 54747 kg
Complejos hidroacústicos "Rubin" (1964) GAK para suministro de submarinos multipropósito Ayalashka E. I. Número total de dispositivos - 56 Masa de instrumentos - 54747 kg
 Estaciones hidroacústicas "TITAN-2" (1966) Gas para barcos grandes anti-submarinos Dispositivos totales Masa de instrumentos - 37 - 16000 Kg Jefe Designer Harat G. M.
Estaciones hidroacústicas "TITAN-2" (1966) Gas para barcos grandes anti-submarinos Dispositivos totales Masa de instrumentos - 37 - 16000 Kg Jefe Designer Harat G. M.
 Estaciones hidroacústicas "Argun" (1967) Gus para pequeños buques anti-submarinos Total de dispositivos Masa de instrumentos - 30 - 7600 kg con diseñador jefe de cremallera Ivanchenko V. P.
Estaciones hidroacústicas "Argun" (1967) Gus para pequeños buques anti-submarinos Total de dispositivos Masa de instrumentos - 30 - 7600 kg con diseñador jefe de cremallera Ivanchenko V. P.
 Estaciones hidroacústicas "Sulna" (1969) Detección de gases del ancla y minas inferiores El número total de dispositivos Masa de instrumentos - 20 - 3900 kg Jefe de diseñador Lyashenko G. G.
Estaciones hidroacústicas "Sulna" (1969) Detección de gases del ancla y minas inferiores El número total de dispositivos Masa de instrumentos - 20 - 3900 kg Jefe de diseñador Lyashenko G. G.
 Estaciones hidroacústicas "Beech" (1971) Gas para los tribunales de investigación Número total de instrumentos MASA DE INSTRUMENTOS - 30 A 11,000 KG Jefe de diseñador Klimenko J. P.
Estaciones hidroacústicas "Beech" (1971) Gas para los tribunales de investigación Número total de instrumentos MASA DE INSTRUMENTOS - 30 A 11,000 KG Jefe de diseñador Klimenko J. P.
 Complejos hidroacústicos "Platinum" (1972) GAK para buques de superficie del diseñador principal de desplazamiento medio y grande Klimovitsky L. D. Número de instrumentos - 64 Masa de instrumentos - 23 toneladas
Complejos hidroacústicos "Platinum" (1972) GAK para buques de superficie del diseñador principal de desplazamiento medio y grande Klimovitsky L. D. Número de instrumentos - 64 Masa de instrumentos - 23 toneladas
 Complejos hidroacústicos "Polynom" (1979) GAK para el Norte del Gran Diseñador Principal de Desplazamiento, Soloviev V. G. Número total de instrumentos - 152 Masa de instrumentos - 72,000
Complejos hidroacústicos "Polynom" (1979) GAK para el Norte del Gran Diseñador Principal de Desplazamiento, Soloviev V. G. Número total de instrumentos - 152 Masa de instrumentos - 72,000
 Complejos hidroacústicos "Star-M 1" (1986) Digital Guk para el diseñador del jefe de desplazamiento medio NK Aleshchenko O. M. Número total de dispositivos - 64 dispositivos de masa - 23000 kg
Complejos hidroacústicos "Star-M 1" (1986) Digital Guk para el diseñador del jefe de desplazamiento medio NK Aleshchenko O. M. Número total de dispositivos - 64 dispositivos de masa - 23000 kg
 Complejos hidroacústicos de "Kabarga" (1987) Gus Miníscumes para senderos marinos, básicos y de raid. Número total de dispositivos - 42 Masa de instrumentos - 8500 kg de diseñador jefe Lyashenko G. G.
Complejos hidroacústicos de "Kabarga" (1987) Gus Miníscumes para senderos marinos, básicos y de raid. Número total de dispositivos - 42 Masa de instrumentos - 8500 kg de diseñador jefe Lyashenko G. G.
 Complejos hidroacústicos "STAR M 1 -01" (1988) Gas digital para buques de superficie del pequeño diseñador jefe de desplazamiento Aleshchenko O. M. Número total de dispositivos - 60 Masa de instrumentos - 16,500 kg
Complejos hidroacústicos "STAR M 1 -01" (1988) Gas digital para buques de superficie del pequeño diseñador jefe de desplazamiento Aleshchenko O. M. Número total de dispositivos - 60 Masa de instrumentos - 16,500 kg
 Complejos hidroacústicos "STAR-2" (1993) Digital Gancock para NC Gran diseñador jefe de desplazamiento Borisenko N. N. Número total de dispositivos - 127 dispositivos de masa - 77742 kg
Complejos hidroacústicos "STAR-2" (1993) Digital Gancock para NC Gran diseñador jefe de desplazamiento Borisenko N. N. Número total de dispositivos - 127 dispositivos de masa - 77742 kg

 Complejos de perspectiva Proyecto CORVETTE 12441, que proporciona la instalación de Gas "Zarya-2"
Complejos de perspectiva Proyecto CORVETTE 12441, que proporciona la instalación de Gas "Zarya-2"
Capítulo 1. Análisis de los principales métodos para determinar la ubicación de la fuente de señales de navegación con perlas de ultra hilo.
1.1. Estableciendo el problema de desarrollar un complejo de navegación hidroacústica.
1.1.1. Experiencia de la IPMT en el desarrollo de los sistemas de navegación de rango.
1.1.2. Las tareas de desarrollar Hans-Uch.
1.2. Métodos de amplitud para determinar la información de iluminación con antenas de tamaño pequeño (ultra propuesta).
1.2.1. Antena equidistante lineal.
1.2.2. Antena equidistante circular.
1.2.3. Potencial para enfrentar con precisión los retrasos de amplitud.
1.3. Sobre la medición del cambio de fase de las señales de dos tonos MESVD, el ruido distorsionado.
1.4. Dirección estimada de la fase de búsqueda de fórmulas en sistemas con antenas de configuración simples.
1.4.1. Receptor de elementos de la bahía.
1.4.2. Receptor de cuatro elementos.
1.4.3. Delarteles de fase de seis canales.
1.5. El método de agotamiento de la fuente de señales de navegación utilizando antenas circulares discretas con gran número Elementos.
1.5.1. La salida de las fórmulas estimadas y la evaluación del error del retrasador UB con una base circular.
1.5.2. Los algoritmos de búsqueda de dirección para el buscador de dirección con una base circular, teniendo en cuenta los cambios en la orientación de la antena de ángulo.
1.6. Conclusiones.
Capítulo 2. Procesamiento estadístico de la información del sistema de navegación hidroacústica con la base UltraShort.
2.1. Resolviendo la tarea del pañal según los métodos de procesamiento estadístico.
2.2. Ecuaciones de pañales para antenas de varios elementos de diversas configuraciones.
2.2.1. Antena lineal multi-elemento.
2.2.2. Antena con un número arbitrario de elementos en una base de datos circular.
2.2.3. Antena de cuatro elementos.
2.2.4. Antena circular con un elemento adicional en el centro.
2.2.5. Antena de dos cabinas.
2.2.6. Conclusiones.
2.3. Características de procesar una gran cantidad de señal de navegación de frecuencia.
2.4. Configuración de la antena y evaluación de exactitud potencial.
2.4.1. Antenas con una distancia de media onda entre los elementos.
2.4.2. Antenas rewrked.
2.4.3. Seleccione el sector de revisión basado en la fase de antena.
2.5. Conclusiones.
Capítulo 3. Metodología para evaluar la precisión de los sistemas de navegación con la base de ultra-tornillos.
3.1. Evaluación del componente sistemático del error de la definición de rodamiento.
3.1.1. Fase de fase de una antena de recepción múltiple imperfecta.
3.1.2. Desarrollo de equipos para la certificación metrológica de recibir antenas de varios elementos.
3.1.3. Estudios experimentales de la precisión de las antenas en condiciones de laboratorio.
3.2. Estimaciones de la precisión del buscador de dirección de banda ancha (el estudio de las características de la antena para procesar una señal de navegación multifrenchas).
3.3. Estudios experimentales de las principales características del sistema de navegación de ultra circuito-base en las condiciones de un mar pequeño.
3.3.1. El método de certificación del sistema comparando con los datos del sistema de navegación certificado (en el ejemplo de Hans-DB).
3.3.2. Métodos para evaluar la precisión de las mediciones angulares por parte de los datos de la cámara de rango.
3.3.3. Método de graduación del sistema de navegación de ultra voltaje-base en condiciones de escala total utilizando la baliza de referencia.
3.3.4. Justificación metrológica para la graduación del sistema de navegación de ultra voltaje de acuerdo con Hans DB y GPS.
3.4. Evaluación de las características metrológicas de Hans-UBB bajo el mar profundo.
3.5. Conclusiones.
Capítulo 4. Métodos para construir y desarrollar los elementos principales del sistema de comunicación hidroacústica del aparato submarino. 146 4.1. El enfoque general de la evaluación de los principales parámetros del gase para el ANCA.
4.1.1. General.
4.1.2. Sobre la estructura del símbolo de la información.
4.1.3. Sobre la sincronización.
4.1.4. En la selección del pulso para evaluar las características del canal de comunicación.
4.1.5. Procesamiento de bloques de datos.
4.1.6. Modelado numérico del canal de comunicación. 153 4.2.0 Desarrollo de piezoprabridores de banda ancha y antenas para gas.
4.2.1. Métodos Piezo-Métodos Cilíndricos de Banda Ancha.
4.2.2. Piezopraverters cilíndricos con características controlables.
4.2.3. Tipo de pistón de banda ancha Piezoformadores.
4.2.4. Sobre la coincidencia eléctrica de piezopraverters en una amplia banda de frecuencia.
4.2.5. Sobre la eficiencia energética de los transductores de banda ancha.
4.2.6. Características de las antenas desarrolladas.
4.3. Receptor multi-elemento de señales de gase con control adaptativo de la HN de acuerdo con el buscador de dirección del sistema de navegación.
4.3.1. Procesamiento de datos.
4.3.2. Características de la antena UBB al recibir señales del sistema de comunicación.
4.4. Estudio experimental del sistema de comunicación multifrecuencia no coherente con corrección de amplitud de la relación de engranaje del canal.
4.4.1. Algoritmo para procesar una señal de multifrecuencia.
4.4.2. Esquema estructural Sistemas de comunicación.
4.4.3. Estudios experimentales de los elementos del sistema de comunicación hidroacústica en las condiciones de un mar pequeño.
4.5. Conclusiones.
Capítulo 5. Desarrollo de Doppler Lag como parte del sistema de navegación a bordo del aparato submarino.
5.1. Antenas.
5.2. Procesamiento espectral de señales de pulso corto.
5.3. Estructura y circuitos.
5.4. Estudios extranjeros de las características del retraso como parte de la ANCA.
5.5. Conclusiones.
Capítulo 6. Implementación técnica y experiencia de la aplicación práctica de los medios hidroacústicos para navegar por robot submarino. 207 6.1. Implementación técnica del sistema de navegación hidroacústica con base de ultra-tornillos.
6.1.1. Esquema estructural de Hans-UKB.
6.1.2. Características del hardware de construcción.
6.1.3. Sistema de navegación de la antena de recepción.
6.1.4. Procesamiento de datos.
6.1.5. Interfaz de usuario.
6.1.6. Software.
6.1.7. Pruebas extranjeras y operación práctica de Hans-UKB.
6.2. Especificaciones Kit Equipment Gass.
6.2.1. Características principales.
6.2.2. Principio de funcionamiento.
6.2.3. Diagrama estructural del receptor.
6.2.4. La estructura de la señal de gas.
6.2.5. Los resultados de las pruebas marinas en el mar profundo.
6.3. Complejo de navegación hidroacústica.
6.3.1. La composición y el propósito del complejo naval de navegación.
6.3.2. Propuestas técnicas para el desarrollo de un sistema combinado de navegación y gestión.
6.4. Pruebas complejas de navegación hidroacústica y experiencia en su uso durante el trabajo real.
6.4.1. Pruebas complejas de navegación.
6.4.2. Experiencia en el uso práctico de las herramientas de navegación hidroacústica durante los motores de búsqueda reales.
Lista recomendada de disertaciones.
Desarrollo de métodos y algoritmos para la navegación unidireccional de submarinos autónomos deshabitados. 2013, candidato de ciencias técnicas Dubrovin, Fedor Sergeevich
Métodos para procesar señales hidroacústicas recibidas en la zona de los sistemas de recepción y emisores de Fresnel. 2010, Doctor en Ciencias Técnicas Kolmogorov, Vladimir Stepanovich
Bajo el agua y navegación utilizando un campo electromagnético. 2006, Doctor en Ciencias Técnicas Shibkov, Anatoly Nikolaevich
Métodos y sistemas para mejorar la seguridad de la navegación basados \u200b\u200ben dispositivos de navegación hidroacústica con una base lineal de receptores direccionales 2006, Doctor en Ciencias Técnicas Zavyalov, Viktor Valentinovich
Navegación del aparato autónomo autónomo con la ayuda de un sistema de navegación inercial inerial. 2017, candidato de ciencias físicas y matemáticas Filatova, Gusel Amirovna
Trabajo de disertación similar. en la especialidad "acústica", 01.04.06 CIFRA VAC
Desarrollo del método para aumentar la precisión del posicionamiento de objetos subacuáticos. 2013, candidato de las ciencias técnicas, Alexander Alexandrovich
Método paramétrico de transformación controlada de campos hidroacústicos de emisión de ruido de investigación y buques pesqueros, métodos y sistemas de su medición basados \u200b\u200ben patrones de acústica no lineal 2002, candidato de ciencias técnicas Khaliulov, Fargat Amershanovich
Desarrollo de algoritmos de procesamiento de información en sistemas de títulos múltiples utilizando un análisis espectral rápido de señales. 2005, candidato de ciencias técnicas Davlekaliyev, Roman Kuanishevich
Métodos y medios de soporte de navegación de aviones y control de tráfico aéreo basados \u200b\u200ben tecnologías satelitales. 2004, Doctor en Ciencias Técnicas Slepchenko, Peter Mikhailovich
Teoría y métodos para diseñar sistemas de antena de banda ultra ancha para el basado en pacientes hospitalizados y móviles de radio 2011, Doctor en Ciencias Técnicas Rebovsky, Yuri Anatolyevich
Conclusión de la disertación. sobre el tema "Acústica", Matvienko, Yuri Viktorovich
Resultados principales:
1. Se investigaron los principios de la construcción de sistemas ultrapotados y se estudió un análisis de los métodos básicos para determinar la posición angular de la fuente de las señales de navegación tonal y de banda ancha durante la información de procesamiento de antenas de recepción de tamaño pequeño.
Se obtuvieron expresiones estimadas y se investigó las características de búsqueda de las características de las tartas de amplitud con un procesamiento total de datos de diferencia.
La baja precisión potencial de los sistemas de configuración más simples que contiene uno, dos o tres pares de receptores ortogonales se observa con métodos de procesamiento de datos de fase y se anota la necesidad de complicaciones de sistemas para aumentar la precisión.
Un método para la dirección que encuentra la fuente de las señales tonales basadas en el uso de antenas con una gran cantidad de receptores estrechamente colocados en una base circular con la definición de la fase acumulativa también se propone, cuyo error puede reducirse a 0.1 grados.
Las fórmulas calculadas y en el ejemplo de antenas circulares con una gran cantidad de artículos se muestran la conexión de los datos del sensor, el rollo y el diferencial del curso y sus errores en el valor de los parámetros de navegación medidos y sus errores.
Basado en el máximo método veraz, la tarea del procesamiento estadístico de los datos de navegación se resolvió cuando se utilizan antenas discretas de configuración arbitraria. En este caso, la evaluación de los parámetros deseados se determina mediante el procesamiento conjunto de todos los pares de canales tomados con diferentes escalas. Los coeficientes de ponderación contienen como un componente geométrico, igual al derivado de la función de fase de acuerdo con el parámetro medido y la energía igual a la señal de señal a actuación en el canal.
Las relaciones estimadas se derivan para la definición de cojinete y el error de amortiguación para varias configuraciones de antena más comunes: lineal, circular, combinado.
Se desarrolló un buscador de dirección de fase basado en el uso de antenas circulares de un tamaño de onda grande con un número limitado de elementos.
La tecnología de reducir el número de canales de procesamiento con la preservación de la resolución angular se está fundamentando separando el procedimiento de pañal en dos etapas: hallazgo de dirección gruesa para determinar el sector de visualización y la solución exacta de la ecuación de rodamientos en una aproximación inicial dada.
La posibilidad de permiso de ambigüedades de fase que surgen durante el funcionamiento de las antenas escasas por los métodos de la amplitud de la dirección de la dirección se justificó.
Teóricamente justificó el logro de la resolución angular de 0.1-0.2 grados con el número de canales 6-8 y el tamaño de la onda de la antena 3-5 de las longitudes de onda de la frecuencia de navegación.
Relaciones para calcular el rodamiento de una antena discreta de tamaño pequeño, el tiempo de propagación de la señal acústica en la abertura de la que es comparable a la frecuencia promedio del espectro recibido.
2. Métodos de investigación para evaluar la precisión de la precisión de HANS UKB y los métodos desarrollados para medir sus características en las condiciones de laboratorio y de herramientas.
Para describir una antena múltiple discreta, se propuso una función de vector, cuyo componente describe el elemento dedicado de la dependencia de la antena de la fase de la señal acústica desde la dirección de su llegada. La definición exacta (experimental) de la función es obligatoria cuando se resuelve la tarea de retrasar el objeto de navegación.
Un soporte para la certificación de antenas de varios elementos, que se instala en una cuenca hidroacústica especializada e incluye una fuente de señales ajustables y un sistema de recepción con una plataforma rotativa de precisión y un equipo de medición de fase multicanal para las señales de tipo de pulso de radio.
Se ha desarrollado una tecnología de certificación de antena, que consiste en medir experimentalmente la función de fase de la antena, la determinación de las funciones analíticas que se aproximan a los datos obtenidos y el uso de ellos en la solución de las ecuaciones de búsqueda de la dirección, con la tabulación de la diferencia de la diferencia de El origen del cojinete y su valor verdadero (instalación) en forma de evaluación del componente sistemático del error.
Las antenas de recepción de varios elementos para muestras activas de sistemas se desarrollan e investigan, lo que proporciona el valor de un error sistemático alrededor de 0.5 aradus.
Se realiza un análisis comparativo del trabajo de Hans DB y UBB en las condiciones de un mar pequeño con una instalación fija de la antena de recepción de ACB.
Analizó el método para estimar las mediciones angulares relativas basadas en el procesamiento de los datos de la cámara de rango.
El método de certificación del sistema UCB en el mar pequeño que utiliza la baliza de referencia basada en el procesamiento de los datos de la máquina de rango está fundamentada. Se muestra que con el error relativo de medir el rango, unos cuantos por ciento, un error del valor de diseño del rodamiento para Annea, que hace que el movimiento alrededor de la antena UKB y un faro en una trayectoria cerrada, no exceda de un grado. .
Se realizó un análisis y se determinaron las características de precisión del sistema UCB basadas en los resultados del trabajo en las condiciones del mar profundo. Como datos de referencia, se utilizaron los datos de DB Hans, el sistema de navegación a bordo y el sensor de profundidad, los datos de la máquina de rango. La viabilidad de analizar la variabilidad diferencial de los datos de la máquina de rango para identificar los fragmentos individuales de la trayectoria de movimiento ANPA y la posibilidad de un promedio razonable de datos angulares con el procesamiento de la trayectoria. Como resultado del análisis, la conclusión se justifica sobre el error de mediciones angulares de aproximadamente 0,5.
La técnica de eliminar las ambigüedades de la fase que surgen de aumentar el tamaño de la base de medición está fundamentada y analizada experimentalmente por el procesamiento estadístico de las señales de frecuencia múltiple.
La antena receptora de varios elementos y el equipo de la radiación (recepción) de señales complejas se desarrollaron y estudiaron experimentalmente, se realizaron estimaciones del error del sistema, lo que constituye las décimas de granizo.
3. Los métodos se investigan y los medios de un sistema de transmisión de información de alta velocidad para el canal hidroacústico de la Junta de ANCPA al recipiente que proporciona.
Se desarrollaron estudios de construcción de piezo-convertidores de banda ancha y convertidores especializados de cilíndricos y varillas y se desarrollaron con características de orientación especiales diseñadas para trabajar en equipos del sistema de comunicación: se propuso un convertidor cilíndrico altamente eficiente con un ancho de banda a tres octavas utilizando capas de cuerno. Configuración, que cumple con los requisitos para trabajar en un mar pequeño; Se propone una variedad de convertidor resonante para la radiación y la recepción de señales de múltiples frecuencias, realizadas en forma de un conjunto de piezocilindros coaxiales; Los piezoprabridores de pistones se proponen con un tipo de un solo lado que funciona en un canal de propagación de señal vertical.
Analizó la estructura del sistema de transmisión de datos para el canal multipath de comunicación con la adaptación del circuito de procesamiento a través del bloque de datos de la longitud final. La transmisión del bloque de información está precedida por el procedimiento para configurar la configuración del receptor, se determina el tamaño del bloque temporal estado actual Canal de comunicación. Los métodos de modelado numérico analizaron las características de selección de señales conectadas y muestra la conveniencia de usar la señal a la manipulación de fase y frecuencia combinada.
Se propone una metodología para estimar las características de pulso del canal de comunicación y el refinamiento del momento de la sincronización mediante la transmisión y el procesamiento de una serie de pulsos de la fase alterna.
Un diagrama de las señales de la señalización de la señalización de una antena de navegación de varios elementos con la realización del filtrado espacial del haz directo en las condiciones de distribución de múltiples datos basados \u200b\u200ben datos en la posición angular de la fuente de señales e interferencias recibidas durante el funcionamiento de Se propone Hans UKB.
Estudios completados y justificados la posibilidad de transferir información en muchos canal de frecuencia Comunicación con la alineación preliminar de la respuesta de frecuencia a través del canal y la selección del mensaje actual en función de un análisis de energía comparativo en cada canal de frecuencia. Los estudios experimentales de dicho sistema de procesamiento en un mar muy pequeño confirmaron la posibilidad de usar equipos para transmitir imágenes gráficas a una velocidad de aproximadamente 3000bit / s a \u200b\u200buna baja probabilidad de errores.
4. Para la navegación a bordo, el robot submarino está diseñado e integrado en el complejo Doppler Lag.
Los estudios completaron y desarrollaron antenas de retraso especializadas con alta sensibilidad de eco obtenidas debido a la coordinación mecánica acústica óptima de los métodos piezoeléctricos de la antena con un entorno de trabajo.
Para aumentar la velocidad del retraso, se propone e implementa un método de procesamiento espectral de señales de pulso cortas, proporcionando una resolución de alta frecuencia debido a la formación de implementaciones largas de las señales reflejadas. El método le permite determinar los componentes de velocidad con la dispersión mínima en un segundo.
Diseñado y utilizado como parte de la muestra Doppler de muestra experimental ANPA.
Se desarrolló una técnica de graduación del retraso en condiciones de escala a gran escala calculando la velocidad de ANPA en el rango de búsqueda de datos de Hans.
5. Diseñado, probado y probado en operaciones reales un complejo de navegación hidroacústica, que garantiza la formación de una imagen de información de navegación del movimiento de la misión a bordo del barco y ANCA, que consiste en herramientas de navegación hidroacústica, transmisión de información y medición de absoluta. velocidad.
Diseñado, probado en un mar pequeño y profundo e integrado en el complejo de navegación del Hans UKB, que incluye: una fuente sincronizada de la señal de navegación en la instalación, un complejo de procesamiento de buques con una antena receptora en un cable de cable, receptor GPS. El sistema tiene las siguientes características: rango - 6-10 km; El error de medición del cojinete es inferior a 1 grados; El error de medición de límite es del 0,5%. Confirmó experimentalmente la posibilidad de operar el sistema en la posición de la posición de la ANCA, lo que hace una transición larga a lo largo del objeto extendido con el movimiento del recipiente de suministro y remolque la antena receptora a una velocidad de hasta 5 nodos.
Diseñado, probado y utilizado como parte de un aparato oculto, un sistema de alta frecuencia de navegación UKB con la colocación de la fuente a bordo del recipiente, y el receptor en la máquina.
Diseñado y probado en la composición de los medios hidroacústicos de soporte de navegación y información, un equipo de transmisión de equipos APA para el control operacional del estado de vigilancia y trabajo de búsqueda en las condiciones del mar profundo y el canal de comunicación vertical. El equipo proporciona una transmisión de datos a una velocidad de 4000bit / s, con una probabilidad de errores aproximadamente del uno por ciento, lo que garantiza la transmisión de los marcos de imagen para 45C.
Diseñado, probado e integrado en el Sistema de navegación a bordo Doppler LAYS, proporcionando la medición de la velocidad absoluta de la ANCA en el rango de velocidades 0-2M / s con un error de 1-2 cm / s.
Se propone la tecnología de aplicación del complejo de navegación:
Hans DB - para múltiples carreras de la ANCA en las áreas dedicadas con búsqueda en áreas con mayores requisitos de precisión.
Hans UKB Si ya no hay transiciones al rastrear objetos extendidos o con fines de movimiento, en caso de arranque de emergencia de la ANCA, en el caso de lanzamientos secretos.<
Para con el cálculo de las trayectorias en el número, cuando el ANCA se libera en un punto específico, al agregar al uso de los sistemas de TV.
El trabajo exitoso del complejo en la composición del ANC no se demuestra al realizar motores de búsqueda reales en el océano.
Gratitud.
En conclusión, quiero expresar un profundo aprecio a todos los empleados de la IPMT, quienes participaron en el desarrollo y las pruebas de sistemas hidroacústicos de vehículos subacuáticos. Agradece especial a ACADICA AGEAV M.D., los jefes de la región de Kaskin, B. A. y Rylov N.I.
Conclusión
Referencias de investigación de tesis doctor en Ciencias Técnicas Matvienko, Yuri Viktorovich, 2004
1. AGEEV M.D. Vehículo autónomo modular no tripulado de 1.TP. - MTS Journal, 1996, vol. 30, 1, p. 13-20.
2. Vehículos submarinos autónomos deshabitados. Bajo la Ed General. Acad. AGEAVA M, D. - Vladivostok, Dalnawka, 2000, 272C.
4. R.BABB. AUV Navegación para encuestas científicas submarinas. Tecnología Sea, 1990, diciembre, p.25-32.
6. J. Romeo, G. Lester. La navegación es clave para las misiones AUV. Tecnología de mar, 2001, diciembre, p.24-29.
7. Borodin v.I., Smirnov G.E., Tollava H.A., Yakovlev G.V. Herramientas de navegación hidroacústica. L., Construcción naval, 1983, 262C.
8. miln p.h. Sistemas de posicionamiento hidroacústico. L., construcción naval, 1989,316c.
9. Gestone J.A., Cyr R.J., Roesler G :,, George E.S. Desarrollos recientes en la navegación acústica submarina. Diario de navegación, 1977, v.30, 2, p.246-280.
10. BOLDREV B.C. Métodos de precisión. Definiciones de coordenadas durante el trabajo hidrofísico en el mar abierto. Construcción naval en el extranjero, 1980. №2. C.29-42.
11. Kyslov A. F., Postnikov I.V. Características de precisión de sistemas de navegación de balizas con una base acústica larga. TEZ. Dokl. 2 All-Union. Conf. Investigación y desarrollo del océano, L., 1978. SME.2, P.95-96.
12. Kasatkin B.A., Kobidze V.V. Características de la navegación hidroacústica en la zona de estante. En sábado Dispositivos submarinos y sus sistemas, desde DFFA, Vladivostok, 1977, de 84-88.
13. Kasatkin B.A., Kobidze V.V. Sistema hidroacústico de navegación sincrónica. Patente R.F. G01S 9/60, № 713278, 1978.
14. Smirnov G.E., TOLLOVA N.A. Sistemas de navegación con balizas hidroacústicas. Construcción naval en el extranjero. 1980, №9, p.45-54.
15. K. Vesgard, R. Hansen, V. Jalving y H.Pedersen. The Hugin 3000 Encuesta AUV -Design y Resultados de campo.- / Intervención submarina 2001 /.
16. T. Martin y G. peregrino. Desafíos de la encuesta en el posicionamiento acústico de aguas profundas de los vehículos subacuáticos remolcados o atados. .- / intervención subacuática 2001 /.
17. Hubert Thomas, Eric Petit. De vehículos autónomos submarinos (AUV) a vehículos subacuáticos supervisados \u200b\u200b(SUV). OCÉANOS-97.
18. Paramonov A.A., Klyuev M.C., STOCKOZHEV P.P. Algunos principios para construir sistemas de navegación hidroacústica con una base de datos larga. VII INTERDDES Escuela científica. conf. "Métodos modernos y medios de estudios oceanológicos", Moscú, 2001, P.244-245.
19. Paramonov a.a., Afanasyev v.n. Hans-M sistema de navegación hidroacústica. VI interday Escuela científica. conf. "Métodos modernos y medios de investigación oceanológica", Moscú, 2000, p. 100-112.
20. AGEEV MD, Blidberg D.R., Kiselev Ji.B., Rylov N.I., Shcherbatyuk A.F. Estado y perspectivas para el desarrollo de la robótica submarina. Tecnologías de mar, Vladivostok, Dalnalock, 2001, ISK.4, P.6-23.
21. AGEEV MD, Casatkin B.A., Kiselev L.V., Molokov YU.G., Nikiforov V.V., Rylebov N.I. Vehículos automáticos submarinos. L., construcción naval, 1981.248 p.
22. J. Manley. Vehículos autónomos submarinos para la exploración del océano. 0ceans-2003, p.327-331.
23. KOBIDZE V.V. La velocidad de propagación de señales hidroacústicas en el rango de rangos. Preprint, Vladivostok, que Fedz Academy of Ciences de la URSS, 1979, 37c.
24. KOBIDZE V.V. El estudio de la precisión del alcance hidroacústico. - Autor de la disertación kf-m.n. Vladivostok, ese DVTC de la Academia de Ciencias de la URSS, 1981, 26C.
25. Xavier Lurton, Nicholas W. Millard. La viabilidad de un Sistema de posicionamiento acústico de línea base de Vaiy para AUV. Procedimiento de Ocean-94, Brest-France, 1994, vol.3, PP. 403-408.
26. Kasatkin B.A., Kosarev G.V. Característica de desarrollo de los APS para AUV de muy largo alcance. Procedimiento de Ocean-95, San-Diego, octubre de 1995, V. Yo, p. 175-177.
27. Kasatkin B.A.A. Sistema hidroacústico de rango sincrónico. Patente R.F. G01S 15/08, № 2084923, 1995.
28. Posicionamiento acústico. www. Mors.fr.product.
29. Gama combinada y sensor de navegación con cojinetes. Modelo NS-031. -www. Sonatech.com.product.
30. Kasatkin B.A.A. Sistema hidroacústico de navegación sincrónica. Patente R.F. G01S 15/08, № 2084924, 1995.
31. D. Thomson, S. Elson. Sistemas de posicionamiento acústico de nueva generación. 0ceans-2002, p.1312-1318.
32. TRANSPONDO GENÉTICO PROGRAMABLE Y SUPER MINI TRANSPONDE / RESPONDO, TIPOS 7971/7977 / 7978,7970 / 7973 www.sonardyne.co.uk
33. B. Manson. Posicionamiento de área amplia con precisión LM. -Internacional de los sistemas oceánicos, DERECIME DE 2001, pág. 15-19.
34. Kasatkin B.A., Kosarev G.V. Bases físicas del alcance acústico. Boletín de DVO R And998, №3.c.41-50.
35. KOBIDZE V.V. Modelos de errores y algoritmos para su procesamiento de información orientada a rango en sistemas de navegación hidroacústica. PredIprint, Vladivostok, ese DVTC de la Academia de Ciencias de la URSS, 1979, 42C.
36. Kasatkin B.A.A. Características invariantes del campo de sonido en el océano en capas. Dokl. Academia de Ciencias de la URSSR, 1986, 291, №6, p. 1483-1487.
37. M.DEFFENBAUGH, J.G. Bellingham, N. Schmidt. La relación entre el posicionamiento esférico e hiperbólico. Procedimiento de Ocean-96,
38. Kasatkin B.A., Kosarev G.V. Análisis de la precisión de la medición de las coordenadas de los encuestados de baliza del sistema de navegación hidroacústica. Tecnologías de mar, número.1. Vladivostok, Dalnaka, 1996, p.60-68.
39. Kasatkin B.A., Kosarev G.V. El uso del método transversal para determinar las coordenadas absolutas de las balizas demandadas. Tecnología de mar, vol.2. Vladivostok, Dalnaka, 1998, P.65-69.
40. J. OpderBecke. Calibración en el mar de un sistema positante de vehículos submarinos USBL. -Ceans "2000.
41. POSIDONIA 6000. Sistema de posicionamiento acoístico submarino. www.ixsee-ceano.com.
42. Boletín. Kongsberg simrad. Problema No.2-2000. www.kongsberg-simrad.com.
43. K. Vesgard, R. Hansen, B.Jalding, O.A. Pedersen. La encuesta HUGIN 3000 AUV. RESULTADOS DE DESGO Y CAMPO. 0ceans "2001.
44. Sistema de seguimiento de bajo costo LXT. www.ore.com.
45. Thomas C. Austin, Roger Stokey, C. von Alt, R. Arthur, R. Goldborough. Ratas, un sistema de seguimiento acústico relativo desarrollado para la navegación oceánica profunda: océanos "97.
46. \u200b\u200bThomas C. Austin, Roger Stokey. Relative Acoustic Tracking.- Tecnología de mar, 1998, marzo, p.21-27.
47. M. Watson, C. Loggins y Y.T. Ochi. Un nuevo sistema de alta precisión súper corta línea de base (SSBL). Tecnología submarina, 1998, P.210-215, Tokio, Japón.
48. James E. Deleteu. Sistemas de posicionamiento acústico subacuático. OCEANS-95, vol.1, p. 167-174, San Diego, Estados Unidos.
49. Nautronix. Ats preciso posicionamiento www.nautronix.com
50. Yin Dongmei, Song Xinjian, Feng Haihong. La tecnología clave para implementar un sistema de seguimiento y posicionamiento de objetos subacuáticos. -El Workshop International Workshop Harbin, China, 2002, P.65.
51. Yin Dongmei, Song Xinjian, Feng Haihong. Diseñando un sistema de positinización acústica subacuática. El Taller Internacional 3-D Harbin, China, 2002, P.43.
52. Komulakov B.A.A. Sistemas hidroacústicos con balizas por los encuestados para rastrear complejos submarinos remolques. - Construcción naval, 1997, No. 6, P.39-45.
53. Paramonov A.A., Nosov A.V., Kuznetsov V.N., Dreuchsev S.A., Klyuev M.S., I I
54. STOROZHEV P.P. En la mejora de la precisión del sistema de navegación hidroacústica con una base de núcleo sulture. Vii internacional confirmado. Según Oceanology, M., 2001, p.80-81.
55. Bogorodsky A.V., Koryakin Yu.A., Ostrukhov A.A., FOMIN YU.P. Tecnología hidroacústica de investigación y técnica de desarrollo oceánico. Vii internacional confirmado. Oceanología, M., 2001, P.266-269.
56. Zlobina N.V., Kamenev S.I., Kasatkin B.A. Análisis del error del sistema de navegación hidroacústica con base de ultra-tornillos. En sábado Robots subacuáticos y sus sistemas. Número 5,1992, Vladivostok, IPMT DVO RAS, P.116-123.
57. Kasatkin B.A., Kulinchenko S.I., Matvienko yu.v., Nurgaliev R.F. El estudio de las características del buscador de la dirección de la fase para UBB-HANS.- en SAT. Robots subacuáticos y sus sistemas. Vish.6,1995, Vladivostok, Dalnawka, P.75-83.
58. Kasatkin B.A. Evaluación del error del retrasador UB con una base circular. En sábado Tecnología de mar. Vol. 1,1996, Vladivostok, Dalnawka, P.69-73.
59. Kasatkin B.A., Matvienko y.v. El método para determinar el cojinete en la fuente de radiación y el dispositivo para su implementación. Patente de RF No. 2158430, BUL. Isoble .№33, 2000
60. MATVIENKO YU.V., Makarov V.N., Kulinchenko S.I. , Nurgaliyev r.f., rylov r.n. Sistema de navegación hidroacústica con base UltraShort. Tecnologías de mar, Vladivostok, Dalnalock, 2000, descarga, s. 102-113.
61. MATVIENKO YU.V. Procesamiento de datos en un buscador de dirección UB basado en una antena múltiple imperfecta. VIII INTERDDES Escuela científica. conf. "Métodos modernos y medios de investigación oceanológica" Moscú, 2003, Parte 1, P.24-25.
62. John G. Proakis. Comunicaciones digitales. Editorial de la industria de la electrónica, China, Beijing, 2000, 928P.
63. M.StoJanovic. Avances recientes en comunicaciones acústicas submarinas de alta velocidad. Ieee Journal Oceanic Engineering, vol.2 L, No.2, 1996, pág. 125-136.
64. M.StoJanovic, J.Catipovic, J.Proakis. Comunicaciones digitales coherentes de fase para canales de cuentas submarinos. Ieee Journal Oceanic Engineering, vol. 19, no. 1, 1994, p.100-111.
65. Stojanovic M., J.A. Catipovic y j.g. Proáctil Procesamiento espacial y temporal de complejidad reducida de señales de comunicación acústica subacuática.- J. Acoust. SOC. Soy., 98 (2), pt.l, ago. 1995, p.961-972.
66. J. Labat. En tiempo real comunicación submarina. Ocean-94, Brest, Francia, vol.3, p.501-506.
67. a.g. Bessios, F.M. Caimi. Compensación multipath por la comunicación acústica submarina. Ocean-94, Brest, Francia, vol.1, p.317-322.
68. Lester R. LEBLANC. Procesamiento Spatio-Temporaal de datos de comunicación acústica coherente en aguas poco profundas. IEEE J. Océano. Ing. Vol.25, no 1, enero, 2000, p. 40-51.
69. Lester R. Leblanc. Formador de vigas adaptativas para la comunicación en aguas poco profundas.
70. B. Geller, V. CAPELLANO, J.M. Brossier, A. Essebbar y G. Jourdain. Ecualizador para la transmisión de velocidad de video en la comunicación multipath submarina. IEEE J. Océano. Ing. Vol.21, no 2, abril, 1996, p. 150-155.
71. Billon D., Quellec B. Performance de los sistemas de comunicación submarina acústicos de alta datos mediante formación de hazas adaptables y ecualización. Ocean-94, Brest, Francia, vol.3, p.507-512.
72. R. Recubrimientos. Comunicación acústica submarina. Tecnología de mar, 1994, no. 6, p. 41-47.
73. A. Zielinski, Yoon Yoon Yoon, Lixue Wu. Análisis de desempeño de las comunicaciones acústicas digitales en el canal de aguas poco profundas. Ieee Journal Oceanic Engineering, Vol.20, No.4, 1995, P.293-299.
74. L. WU y A. Zielinski. Rechazo multipath usando enlace acústico de haz estrecho. -Oceans-88, Baltimore, P.287-290.
75. Wang C.H., Zhu Min, Pan Feng, Zhang X.J., ZHU W.Q. Mapa de comunicación acústica subacuática MPSK.
76. Serie ATM 870. Módems de telemetría acústica. Manual de usuario. - DataSonics, FEBRY 1999.
77. K. Scussel, J.Rice, S. Merriam. Un nuevo módem acústico MFSK para la operación en canales adversos submarinos. OCÉANOS-97, HALIFAX.
78. J. Catipovic, M. Deffenbaugh, L.Freitag, D. Frye. Un sistema de telemetría acústica para la adquisición y control de datos de Ama de Ama de Océano profundo. Océanos-89, p. 887-892.
79. F. Caimi, D. Kocak, G. Ritter, M.Schalz. Comparación y desarrollo de algoritmos de compresión para la telemetría AUV. Avances recientes.
80. P.I. Penin, E.A. Tsellev. En algunas aproximaciones utilizadas en el cálculo de los canales de comunicación hidroacústica. Compilación acústica del extremo este, vol. 1, Vladivostok, 1975, p. 15-18.
81. P.I. Penin, E.A. Tsellev, a.v. Shulgin. Cálculo energético de los canales de comunicación hidroacústica. Compilación acústica del extremo este, vol. 1, Vladivostok, 1975, p. 19-23.
82. SVVERKIN E.I. Telemetría hidroacústica en Oceanology. - L. 1978. 149c., Publicación de la casa de lenuniversidad.
83. V.P. KODANEV, S.P. Piskarev. Métodos para optimizar las características del sistema de transmisión de información digital en el canal hidroacústico en condiciones de recepción de un solo aparejo. Magazine acústica, 1996, volumen 42, №4, p.573-576.
84. YU.V. Zakharov, v.p. Kodanev. La resistencia al ruido de la recepción adaptativa de señales acústicas complejas en presencia de reflexiones de los límites oceanos. Magazine acústica, 1996, volumen 42, №2, p.212-219.
85. YU.V. Zakharov, v.p. Kodanev. Recepción adaptable de señales en el canal de comunicación hidroacústica con respecto a Doppler Scattering Acoustic Magazine, 1995, Volume 41, No. 2, P.254-259.
86. YU.V. Zakharov, v.p. Kodanev. Estudios experimentales de un sistema de transmisión de información acústica con señales similares a los ruidos. Magazine acústica, 1994, volumen 40, №5, p.799-808.
87. Volkov A.V., Kuryanov B.F., Penkin M.M. Comunicación digital hidroacústica para aplicaciones oceánicas. Vii internacional confirmado. Oceanología, M., 2001, p.182-189.
88. L.R. Leblanc y r.r.j. Beauyean. Procesamiento Spatio-Temporaal de datos de comunicación acústica coherente en aguas poco profundas. Ieee Journal Oceanic Engineering, vol.25, no. 1, 2000, p.40-51.
89. M. Suzuki, K. Nemoto, T. Tsuchiya, T. Nakarishi. Telemetría acústica digital de información de video en color. OCEANS-89, P.893-896.
90. R. Rowlends. F.KVINN. Límites de la velocidad de transferencia de información en la telemetría hidroacústica. - En la CN. Acústica subacuática, Moscú, Mundo, 1970, P.478-495.
91. Crestas A.A.A. Medidores de velocidad del barco. Ji., Empleo, 1978, 286C.
92. K.V. Jorgenson, b.l. GROSE, F.A. Crandal. Doppler Sonar aplicado a la navegación de la precisión. Ocean-93, vol.2, p.469-474.
93. Kasatkin B.A., Zlobin H.B., Kasatkin S.B. Análisis de las características del agente piezoorformado de la antena fasada de Doppler Lag. En sábado Tecnología de mar. Vol. 1,1996, Vladivostok, Dalnawka, P.74-83.
94. R. Pinkel, M. Merrefield y J. Smith. Desarrollo reciente en la tecnología Doppler Sonar. . Ocean-93, vol.1, p.282-286.
95. RDI Workhorse Navigator DVL. www.rdinstruments.com.
96. Demidine B.M., Zolotarev B.B., Matvienko yu.v., Plotsky V.D., ServetNikov M.I. Sistema de navegación hidroacústica. TEZ. FUNDACIÓN 22 CIENTÍFICA Y TECNOLOGÍA. Konalnevost. Polytech. Inst. Vladivostok, 1974.
97. Demidin v.m., Matvienko yu.v., Plotsky V.D., Servertovikov M.I. Sistema de navegación del aparato subacuático "Skat". Tez.Donal 1 All-Union. Conf. Según el estudio y desarrollo de los recursos oceánicos del mundo. Vladivostok, 1976.
98. Dorokhin K. A. Presentación de los datos del sistema de navegación hidroacústica. En sábado Robots subacuáticos y sus sistemas. Número 5,1992, Vladivostok, IPMT DVO RAS, P.94-100.
99. Dorokhin K. A. Hardware y software del bloque de navegación del sistema de navegación hidroacústica. En sábado Robots subacuáticos y sus sistemas. Número 5,1992, Vladivostok, IPMT DVO RAS, P. 101-109.
100. Dorokhin K.A.A. Controlador del sistema de navegación hidroacústica. En sábado Robots subacuáticos y sus sistemas. 1990, Vladivostok, Academia DVO de Ciencias de la URSS, p. 102108.
101. SOSALIN YU.G. Bases teóricas de radar y navegación por radio. M., Radio y comunicación, 1992, pág. 134.
102. MATVIENKO YU.V. En la precisión de los buscadores de la dirección de amplitud. Límite de tecnologías, Vladivostok, Dalnawka, 2003, número 5, p.56-62.
103. Smartyshev MD, Dobrovolsky Yu.yu. Antenas hidroacústicas. Directorio.-Ji., Shipbuilding, 1984, p. 171.
104. Ya.D. Shirman, v.n. MANJO. Teoría y técnica de procesamiento de información de radar sobre el fondo de la interferencia. M., Radio y comunicación, 1981, 416C.
105. J. Bendat, A. PIRSOL. Análisis aplicado de datos aleatorios. Moscú, Mir, 1989, 542C.
106. Kenneth S. Miller, Marvin M. Rochwarger. Acovarince Approch a la estimación de momento especítral. IeeEtransacciones en la teoría de la información, septiembre. 1972, p.588-596.
107. Weiqing Zhu, Wen Xu, Jianyun Yu. Estimación de errores del par de impulso Correlación Fase diferencial Estimador de la matriz de sonar. OCÉANOS-96.
108. Zhu Weiqing, Wang Changhong, Pan Feng, Zhu Min, Zhang Xiangjun. Estimación espectral en ADSP. OCÉANOS-97.
109. Desarrollo de dispositivos, dispositivos y principios para la construcción de sistemas hidroacústicos del aparato submarino. - // Informe sobre el OKR "MAYAK-IPMT" //, científico. Manos. MATVIENKO YU.V. VLADIVOSTOK, GFC NGO Delantero, 1992, 190.
110. MATVIENKO YU.V., RYLOV R.N., RYLOV N.I. Desarrollo de una antena receptora de un hidroletror baaptico de fase de la vista lateral. VII INTERDDES Escuela científica. conf. "Métodos modernos y medios de investigación oceanológica", Moscú, 2001, p.
111. Desarrollo y creación de un aparato submarino autónomo deshabitado con un aumento de la distancia y la autonomía. // científico. Manos. ACADICA AGEAV MD, P. Artista Matvienko yu.v., Vladivostok, IPMT DBO RAS, 2001, No. State ROS. 01.960.010861.
112. Informes especiales sobre OCP "K -1R" // Jefe de diseño académico AGEEV MD, Diputado GL. Const. Matvienko yu.v. Vladivostok, IPMT DVO RAS, 1998-2003.
113. G. Korn, T. Maíz. Manual de matemáticas.- Moscú, ciencia, 1970, 720c.
114. matvienko yu.v. Procesamiento estadístico de la información del sistema de navegación hidroacústica con base de ultra-tornillos. En sábado Tecnología de mar. Número.2,1998, Vladivostok, Dalnawka, P.70-80.
115. Rylov n.i. Sobre la definición de los parámetros de navegación en UKB Hans según una antena de varios elementos. En sábado Tecnologías Marinas, Vladivostok, Dalnawka, 2003, Número 5, P.46-55.
116. A. Steele, S. Byrne, J. Riley, M. Swift. Comparación de desempeño de algoritmos de estimación de rodamientos de alta resolución utilizando datos de prueba simulados y de mar. Ieee Journal Oceanic Engineering, vol.l8, No.4, 1993, P.438-446.
117. P. Kraeuther, J. Bird. Procesamiento de la matriz de componentes principales para el mapeo acústico de Swath. OCÉANOS-97.
118. Circuitos integrados super-altos y procesamiento moderno de señales. Ed. S. Guna, X. Whitehaus. T. Kailat., Moscú, radio y comunicación, 1989, 472C.
119. MARPLE ML. C.JI. Análisis de espectral digital y su aplicación. M. Mundo., 1990, 584C.
120. A. Steele, C.Byrne. Procesamiento de la matriz de alta resolución utilizando técnicas implícitas de ponderación de EigenVector. Ieee Journal Oceanic Engineering, vol. 15, no. 1, 1990, p.8-13.
121. R. ROY y T. KAILATH. Espritación de parámetros de señal a través de técnicas de invariaciones de rotación. IEEE Transacciones en acústica, procesamiento de habla y señal, vol.37, No.7, 1989, P.984-994.
122. Gao Hogze, Xu Xinssheg. Investigación sobre el método de detección de fase del sistema de batimetría de haz de viga múltiple. Iwaet-99, Harbin, China, 1999, p. 198-203.
123. Kinkulkin I.E., RUBTSOV V.D., FABRIK M.A. Método de fase para determinar las coordenadas. M., 1979,. 280s.
124. MATVIENKO YU.V., Makarov V.N., Kulinchenko S.I., Rylov R.N., un retraso de las señales de navegación de banda ancha. En sábado Tecnologías de mar, Vladivostok, Dalnalock, 2000, descarga, s. 114-120.
125. Matvienko yu.v., Makarov V.N., Kulinchenko S.I., Nurgaliyev R.F., Rylov R.N., Kasatkin B.A. El retrasario del sistema de navegación hidroacústica con base ultra-tornillos. Patente de RF №2179730, BUL. Isoble .№5, 2002
126. V. Douglas y R. Pietsch. Técnicas óptimas de formación de vigas para arreglos imperfectamente calibrados. Procedimiento de Ocean-96,
127. MD AGEEV, A.A.A. Boreyko, YU.V. Vaulin, b.e. Gornak, B.B. Zolotarev, yu.v. Matvienko, a.f. Shcherbatyuk actualizó el submarino TSL para trabajar en el estante y en los túneles. - en Sat. Tecnologías de mar, Vladivostok, Dalnawka, 2000, descarga, P.23-38.
128. Matvienko yu.v., Makarov V.N., Kulinchenko S.I. En la selección de la estructura y características del equipo del canal de comunicación hidroacústica de la máquina submarina. - Se sentó. Tecnologías marinas, Vladivostok, Dalnawka, 1996, número.1, P.84-94.
129. Matvienko Yu. V. Estimación de los principales parámetros del sistema de comunicación hidroacústica para la máquina submarina. En sábado Tecnología de mar. Etapa.4,2001, Vladivostok, Dalnawka, S.53-64.
130. Pronóstico de investigación sobre la creación de una gama unificada de aparatos autónomos administrados para aumentar la eficiencia de los sistemas de iluminación de lucha submarina, navegación, anti-submarino y anti-minero
131. Armada. // Informe sobre NIR "Centurion-DVO" //, científico. Manos. ACADICA AGEAV MD, P. Artista Matvienko Yu.V., Vladivostok, IPMT DVO RAS, 1996
132. Fundamentos teóricos del radar. Ed. V.E. Dulevich., Moscú, Radio soviética, 1978, 608c.
133. Kasatkin B.A., Matvienko yu.v. A la evaluación de la banda ancha de conversores cilíndricos de baja frecuencia. Magazine Acoustic, 1983, Volumen 29, №1, p.60-63.
134. BALABAEV S.M., IVIN N.F. Modelado por computadora de oscilaciones y emisión de tamaños finitos. Vladivostok, Dalnaka, 1996, 214 p.
135. Convertidores piezocémicos. Directorio ed. Pugacheva S.I. -Lingrad, Shipbuilding, 1984, 256c.
136. MATVIENKO YU.V. MÉTODOS DE DESARROLLO Y INVESTIGACIÓN PARA DESCRIBIRSE Y CONSTRUCCIÓN DE PIEZO-convertidores cilíndricos de banda ancha. Extracto dis. K.f.-m.n. Academia de Ciencias de Duck Fedz de la URSS, 1985, 22C.
137. MATVIENKO YU.V., YERMOLENKO YU.G., KIROV I.B. Características del desarrollo de las antenas de rango de frecuencia media para los sistemas hidroacústicos del aparato de aguas profundas. TEZ. Dokl. Interunión Conf. , Ed, TOVVMU, VLADIVOSTOK, 1992, P.78-83.
138. V.A. Kasatkin, ju.g. Larionov, Matvienko y.v.development of Deep-Water ARRAY PARA SUBBOTTOM Profiler.- Procedimiento de Océanos-94, Brest-France, 1994.
139. Kasatkin B.A., Matvienko yu.v. El espectro de la frecuencia propia del piezagretro cilíndrico. Diario acústico, 1979, volumen 25, No. 6, P.932-935.
140. Kasatkin B.A.A. , Yermolenko yu.g., matvienko yu.v. Piezopraversor multifuncional para la investigación subacuática. Se sentó Robots submarinos y sus sistemas, IPMT DVO RAS, IP.5,1992, p. 133-140. "
141. ERMOLENKO YU.G., KASATKIN B.A., MATVIENKO YU.V. Emisor hidroacústico. Patente de la Federación de Rusia №2002381, 1993.
142. Kasatkin B.A., Matvienko yu.v. Convertidor electroacústico. -. Auto SVID. №1094159, bul. Isolar., №19,1984.
143. MATVIENKO YU.V, sobre el efecto de la estructura del relleno interno de las características de los agentes cilíndricos piezouplicados. En el libro: Métodos físicos usados \u200b\u200ben investigación y control no destructivos., Khabarovsk, 1981, Parte 2, p. 125-126.
144. Kasatkin B.A., Matvienko yu.v. Cilindrical piezo-convertidor con inversión de inversión en el libro: Uso de métodos físicos modernos en investigación y control no destructivos., Khabarovsk, 1981, Parte 2, P.131-132.
145. Kasatkin B.A., Matvienko yu.v. Radiador de medición del rango de sonido de frecuencia de sonido. Dimensiones acústicas. Métodos y medios. Sesión IV de la Sociedad Acústica Rusa, Moscú, 1995, P.4.
146. Kasatkin B.A., Matvienko yu.v. Convertidor electroacústico cilíndrico. Auto SVID. №1066665, bul. Freno, №2,1984.
147. Kasatkin B.A., Matvienko yu.v. Piezopraversor cilíndrico con características controladas. Magazine acústica, 1982, volumen 28, №5, p.648-652.
148. Kasatkin B.A., Matvienko yu.v. Dispositivo para radiación de sonido de banda ancha. Auto SVID. №794834, 1982.
149. Análisis y desarrollo de antenas hidroacústicas de banda ancha basadas en convertidores piezocerámicos. // Informes sobre NIR "Thinker -1" //, científico. Manos. Matvienko yu.v., vladivostok, gfc ngo delantero, 1983-1985.
150. Desarrollo y prueba de una trayectoria de radiación de señal en forma especial.
151. Informes sobre el componente de la NIR "Evolvent -Polos" //, científico. Manos. Matvienko yu.v., vladivostok, gfc ngo dalstandart, 1988-1990.
152. Investigación de la función de transferencia de una guía de onda acústica y antenas.
153. Informes sobre Nir Aquamarine //, científico. Manos. Kasatkin B.A., P. Artista Matvienko yu.v., Vladivostok, GFC NGO Delantero, 1989. .94c., Ningún número de estado. 01.890.073426.
154. Kasatkin B.A., matvienko yu.v. Características de pulso de piezo-métodos cilíndricos. TEZ. DOKOL ALL-UNION CONF. Océano mundial, Vladivostok, 1983, p. dieciséis.
155. rylev n.i. , Matvienko yu.v., rylov r.n. Antena de recepción de la fase Baaptic View View Hidroletor. Patente de la Federación de Rusia № 2209530, 2003
156. R.A. MONZINGO, TU Molinero. Latos de antena adaptativa. M., Radio y comunicación, 1986, 446s.
157. MATVIENKO YU.V., Makarov V.N., Kulinchenko S.I. En un método para construir un receptor de gaseos para un mar muy pequeño sat. Investigación y desarrollo del Océano Mundial, 6 con vista. Akust. Conf., Vladivostok, 1998, p. 162-163.
158. Matvienko y.v., Makarov V.N., Kulinchenko S. I. Sistema simple de comunicación hidroacústica en mar poco profundo para AUV. Construcción naval y ingeniería marítima, problemas y perspectivas, Vladivostoc, 2001, p. 495-498.
159. MATVIENKO YU.V., Makarov B.H., Kulinchenko S.I. Un simple sistema de comunicación hidroacústica en un mar pequeño para ANCPA para sentarse. Problemas y métodos para el desarrollo y operación de armas y equipos militares de la Armada, Número.32, Vladivostok, TOVMI, 2001. C.268-275.
160. K.V. Jorgenson, b.l. GROSE, F.A. Crandal. H. alegre. Una nueva generación de mezcladores de perfiles acústicos. -Oceans-94, vol.1, p.429-434.
161. B.C. Burdick. Análisis de sistemas hidroacústicos. Ji., Shipbuilding, 1988, 358 p.
162. T. Lago, P. Eriksson y M. Asman. El método de Symmiktos: un método de estimación robusto y preciso para la estimación actual de Doppler Accustic. OCEANS-93, vol.2, p.381-386.
163. T. Lago, P. Eriksson y M. Asman. Estimación espectral a corto plazo de los datos del medidor de corriente de Doppler Thactic Doppler. Ocean-96.
164. H. SUSAKI. Un algoritmo rápido para la medición de frecuencia de alta precisión. Aplicación al sonar Doppler ultrasónico. 0ceans-2000, p. 116-121.
165. H. SUSAKI. Un algoritmo rápido para la medición de frecuencia de alta potencia. Aplicación al sonar Doppler ultrasónico. Ieee Journal Oceanic Engineering, vol.27, no. 1, 2002, p.5-12.
166. MATVIENKO YU.V., KULINCHENKO S.I., Kuzmin a.b. Acumulación cuasicógena de señales de pulso cortas para aumentar la velocidad del retraso Doppler. En sábado Tecnologías marinas, Vladivostok, Dalnawka, 1998, Issu.2, P.81-84.
167. MATVIENKO YU.V., Makarov V.N., Kulinchenko S.I. , Kuzmin a.v. Recepción del tracto de impulso Doppler Doppler de alta precisión Patente de la Federación de Rusia №2120131, 1998.
168. MATVIENKO YU.V., KUZMIN A.V. Doppler de tamaño inferior del retraso para ANPA. - La Quinta Conferencia Científica y Técnica Rusa "El estado actual y los problemas de navegación y oceanografía" (pero 2004, San Petersburgo).
169. MATVIENKO YU.V., Nurgaliev R.F., Rylebov N.I. Sistema de seguimiento hidroacústico para la ubicación del submarino autónomo (ANPA). - Ocean Acoustics, Dokl. 9 shk.-SEM. Acad. Ji.m. Brehov Moscú, 2002, P.347-350.
170. MATVIENKO YU.V., Makarov v.N., Nurgaliyev R.F Módulo de navegación y información de información ANA. TEZ. Dokl. , TOVVMU, VLADIVOSTOK, 1998.
171. Zolotarev V.V., Casatkin B.A., Kosarev G.V., Kulinchenko S.I., Matvienko Yu.V. El complejo hidroacústico para el aparato submarino inhabitado autónomo de aguas profundas. Se sentó Trabajo de la X sesión de RAO, Moscú, 2000. S.59-62.
172. AGEEV MD, Kasatkin B.A., Matvienko yu.v., Rylov R.N., Rylov N.I. Medios hidroacústicos para navegar por robot submarino. VIII INTERDDES Escuela científica. conf. "Métodos modernos y medios de investigación oceanológica", Moscú, 2003, Parte 2, P.40-41.
173. AGEEV MD, VAULIN YU.V., KISELEV JI.B., MATVIENKO YU.V., RYLEBOV N.I., Shcherbatyuk A.F. Sistemas de navegación submarina para ANA. -Viii interfaz. Escuela científica. conf. "Métodos modernos y medios de investigación oceanológica", Moscú, 2003, Parte 2, p. 13-22.
Tenga en cuenta que los textos científicos presentados anteriormente se publican para la familiarización y se obtienen reconociendo los textos originales de tesis (OCR). A este respecto, pueden contener errores asociados con la imperfección de algoritmos de reconocimiento. En PDF la disertación y los resúmenes del autor que ofrecemos tales errores.
Hidroacia rusa submarina a la vuelta del siglo XXI.
Hidroacia militar: la ciencia de élite, cuyo desarrollo puede permitirse solo un estado fuerte
Herman Alexandrov
Tener el mayor potencial científico y técnico (la compañía emplea a 13 médicos y más de 60 candidatos de ciencia), la preocupación desarrolla las siguientes direcciones de prioridad de la hidroacústica doméstica:
Complejos hidroacústicos pasivos y activos multifuncionales (gas) y sistemas (gas), iluminación de muebles subacuáticos en el océano, incluidos submarinos, barcos de superficie, aeronaves, sistemas de detección de nadadores submarinos;
Sistemas con antenas remolcadas extendidas flexibles para trabajar en un amplio rango de frecuencia para buques superficiales y submarinos, así como estacionarios;
Complejos hidroacústicos estacionarios activos, pasivos y activos para proteger el área de la estantería de la penetración no autorizada de los buques de superficie y los submarinos;
Navegación hidroacústica y sistemas de búsqueda y encuestas ";
Transductores hidroacústicos, antenas, matrices de antena fasada de forma compleja que tienen hasta varios miles de canales receptos;
Pantallas acústicas y cargaciones transparentes de sonido;
Sistemas de transmisión de información para el canal hidroacústico;
sistemas adaptativos para procesar información hidroacústica en condiciones de interferencia hidro-costera y señal compleja;
Clasificadores de objetivos para sus firmas y por la estructura fina del campo de sonido;
Medidores de velocidad de sonido para buques superficiales y submarinos.
La preocupación hoy es Diez Empresas ubicadas en St. Petersburgo y la región de Leningrado, Taganrog, Volgogrado, Severodvinsk, República de Karelia, e institutos de investigación, fábricas en la producción en serie de equipos hidroacústicos, equipos especializados para el mantenimiento de equipos en instalaciones, polígonos. Estos son cinco mil especialistas de clase alta: ingenieros, trabajadores, científicos, más del 25% de los cuales son jóvenes.
El personal de la empresa desarrolló casi todos los gak pl producidos en serie ("Rubin", "Océano", "Rubikon", "Skat", Skat-Datrhm, Skat-3), una serie de complejos y sistemas hidroacústicos para barcos de superficie (" Platino ", Polynoma, la estación de detección de nadadores submarinos" Pallada "), sistemas estacionarios" Liman "," Volkhov "," AGAM "," DNIESTER ".
Los sistemas hidroacústicos para submarinos creados por la empresa son medios técnicos únicos, cuya creación requiere el conocimiento más alto y la tremenda experiencia en hidroacústica. Como también, la tarea de detectar un submarino con un reductor de ruido es similar a la tarea de detectar la llama de la vela a una distancia de varios kilómetros en un día soleado brillante, y, sin embargo, para un submarino ubicado en la posición submarina de la GAK - Casi la única fuente de información sobre el medio ambiente. Las tareas principales resueltas por el complejo hidroacústico submarino: la detección de submarinos, buques de superficie, torpedo en modo sin ruido, soporte automático de objetivos, definición de sus coordenadas, clasificación de objetivos, detección y objetivos de retraso en modo de hidrógeno, interceptando señales hidroacústicas en un Amplio rango de frecuencia, comunicación alimentada con sonido en grandes distancias, provisión de una revisión del entorno cercano y la seguridad de la navegación, el entorno de la iluminación del hielo al nadar bajo hielo, proporcionando una protección de Minno-Torpedo de la nave, resolviendo las tareas de navegación - Medición de la velocidad , profundidad, lugar, etc. Además de estas tareas, el complejo debe tener un poderoso sistema de control automatizado, un sistema de autoobservación, debe producir continuamente los cálculos hidrológicos más complejos para garantizar el funcionamiento de todos los sistemas y predecir la situación en el área de la submarino. El complejo tiene simuladores de todos los sistemas del complejo hidroacústico, asegurando la capacitación y la capacitación del personal.
La base de cualquier complejo hidroacústico: antenas, rejillas discretas en fase de formas complejas que consisten en convertidores piezocerámicos, que deben garantizar la recepción de señales del medio de agua en un barco que experimente enormes cargas debido a la presión hidrostática. La tarea del gas es detectar estas señales contra el fondo del propio ruido, el ruido de la ridícula cuando el barco, el ruido marítimo que interfiere con los objetivos, y aún las masas de factores enmascaran una señal útil.
El gas moderno es el complejo digital más complejo que procesa grandes flujos de información en tiempo real (cada complejo del complejo consiste en miles de miles de miles y luego decenas de miles de elementos individuales, cada uno de los cuales debe procesarse de forma sincrónica con todos los demás). Su trabajo es posible solo cuando se utiliza los últimos sistemas multiprocesadores que aseguran el problema de la banda simultánea, en el espacio y la banda multidia, la observación de los campos acústicos circundantes.
El elemento más importante y responsable del complejo es la información recibida. Al crear estos dispositivos, no solo los problemas psicológicos científicos y técnicos, sino también ergonómicos, sino también ergonómicos, no son suficientes para tomar una señal del entorno externo, es necesario que los operadores del complejo (y este sea el número mínimo de Las personas) en cada momento de tiempo tuvieron una imagen completa del entorno circundante, controlando y en realidad la seguridad del barco, y el movimiento de muchos objetivos, superficie, bajo el agua, aire, que representa una amenaza potencial o interés para el submarino. Y los desarrolladores se equilibran constantemente al borde del problema, por un lado, para mostrar la cantidad máxima de información procesada por el complejo, y el operador necesario, por otro lado, para no perturbar la "regla de Miller", que limita La cantidad de información capaz de ser aprendida al mismo tiempo.
Una característica importante de los sistemas hidroacústicos, especialmente las antenas, son los requisitos para su fuerza, durabilidad, la capacidad de trabajar sin reparación y reemplazo durante mucho tiempo, en las condiciones de servicio de combate, reparación de la antena hidroacústica es generalmente imposible.
El gas moderno no puede considerarse como un sistema autosuficiente, cerrado, y solo como un elemento de un sistema de vigilancia integrado de PL, recibir y usar continuamente actualizó una información a priori a los fines de los sistemas de detección no acústicos, la exploración, etc. y la emisión de información sobre el cambio de entorno submarino en el sistema. Analizando situaciones tácticas y recomendaciones pendientes sobre el uso de diversos regímenes de gas en esta situación.
El desarrollo de complejos hidroacústicos para un submarino es una competencia continua con los desarrolladores de un enemigo potencial, por un lado, ya que la tarea más importante del GAC es proporcionar al menos la paridad en la situación de duelo (el enemigo oye y lo reconoce y usted está a la misma distancia), y necesita todas las fuerzas y herramientas para aumentar el rango de gas, y principalmente en modo pasivo de incansableidad, lo que permite detectar los objetivos, no degradarse su propia ubicación, y con los constructores navales, Los proyectores de barcos submarinos, por otro, ya que el ruido de los submarinos disminuye con cada nueva generación, con cada nuevo proyecto, incluso con cada nuevo barco construido, y debe detectar una señal, en términos del nivel más pequeño que el Ruidos de mar circundantes. Y es obvio que la creación de un complejo hidroacústico moderno para los submarinos del siglo XXI es el trabajo conjunto de los desarrolladores del complejo y los desarrolladores del barco, los esfuerzos comunes del diseño y la colocación de elementos del gas. El barco de tal manera que su trabajo en estas condiciones es más efectivo.
El diseño del diseño de GAK PL, existente en nuestro Instituto, le permite resaltar las áreas principales problemáticas, de las cuales vale la pena esperar un aumento significativo en la eficiencia en un futuro próximo.
1. Guck con antena conformal y conformal.
Reducir el ruido del PL asociado con los esfuerzos de los proyectores para optimizar las soluciones técnicas de las estructuras de su casco y mecanismos llevó a una reducción notable en el rango del gas en pl. Un aumento en la abertura de las antenas tradicionales (esféricas o cilíndricas) se limita a la geometría de la punta nasal del caso. Una re-succión obvia en esta situación fue la creación de antenas conformes (combinadas con las intensidades de PL) Antenas, el área total y, por lo tanto, cuyo potencial de energía es significativamente superior a indicadores similares para las antenas de buceo en trampas. La primera experiencia en la creación de tales antenas fue bastante exitosa.
Una dirección aún más prometedora parece crear antenas de conformación y recubrimiento ubicadas a lo largo de la Junta de PL. La longitud de tales antenas puede ser decenas de metros, y el área es más de cien metros cuadrados. La creación de tales sistemas está asociada con la necesidad de permitir una serie de problemas técnicos.
La antena de recubrimiento conformal se encuentra en la región del efecto prevaleciente de las ondas inhomogéneas causadas por la interferencia estructural, así como un obstáculo del origen hidrodinámico, incluido el flujo de incidentes que surge de la excitación. Las pantallas acústicas, tradicionalmente utilizadas para reducir los efectos de la interferencia a la antena, no son lo suficientemente efectivos en el rango de baja frecuencia de las antenas a bordo. Formas posibles de garantizar el trabajo efectivo de las antenas a bordo, a juzgar por la experiencia extranjera, se encuentran, en primer lugar, la colocación constructiva de las máquinas y mecanismos más ruidosos, además de tal manera que su efecto en los sistemas a bordo es mínimo, y en segundo lugar, el uso de métodos algorítmicos para reducir el impacto de la interferencia estructural en el tracto HAC (métodos adaptativos para la compensación de la interferencia estructural, incluido el uso del vibrador colocado en las inmediaciones de la antena). El uso de los llamados métodos de "fase vectorial" para procesar información, que se puede usar para aumentar la eficiencia del complejo, debido al procesamiento conjunto de campos de presión y velocidades oscilatorias. Otra forma de reducir el efecto de la interferencia hidrodinámica que influye en la efectividad de las antenas de cobertura conformes, es el uso de convertidores de películas (placas de PVDF), lo que permite el promedio en un área de 1.0x0.5 m significativamente (a juzgar por los datos En la literatura, hasta 20 dB) reduce el efecto de la interferencia hidrodinámica en un tracto de gas.
2. Algoritmos de procesamiento de información hidroacústica adaptativa acordados con el medio de distribución.
Por "Adaptación", comprendiendo tradicionalmente la capacidad del sistema para cambiar sus parámetros, dependiendo del cambio en las condiciones ambientales para mantener su efectividad. En relación con los algoritmos de procesamiento bajo el término "adaptación", se implica la coordinación de la ruta de procesamiento con las características de las señales y la interferencia. Los algoritmos adaptativos se utilizan ampliamente en complejos modernos, y su efectividad se determina principalmente por los recursos de hardware del complejo. Más modernos son algoritmos que tienen en cuenta la variabilidad temporal del canal de propagación de señales. El uso de tales algoritmos le permite resolver simultáneamente las tareas de detección, designación objetivo y clasificación utilizando una información a priori sobre el canal de propagación de señales. La fuente de dicha información puede ser un modelo oceanoológico dinámico adaptativo, prediciendo con la precisión suficiente de la distribución de la temperatura, la densidad, la salinidad y algunos otros parámetros del medio en el área de acción del PL. Tales modelos existen y son ampliamente utilizados en el extranjero. El uso de estimaciones suficientemente confiables de los parámetros del canal de distribución permite, a juzgar por estimaciones teóricas, es varias veces mejorar la precisión de determinar las coordenadas del objetivo.
3. Sistemas acústicos colocados en dispositivos submarinos no tripulados controlados, tareas decisivas de detección poliestática en modo activo, así como la tarea de buscar los objetos de fondo calentado
El propio submarino es una estructura enorme, más de cien metros de largo, y no todas las tareas, cuya solución es necesaria para garantizar su propia seguridad, puede resolverse colocando los sistemas hidroacústicos en el propio barco. Una de estas tareas es la detección de objetos inferiores y solubles que representan el peligro para el barco. Para considerar el objeto, debe acercarse a él como una distancia cercana, sin crear amenazas a su propia seguridad. Una forma posibles de resolver este problema es la creación de un aparato no tripulado submarino administrado colocado en un submarino capaz de controlar independientemente o mediante el control de una conexión por cable o de sonido para abordar el objeto de interés y clasificarlo, y si es necesario destruir. De hecho, la tarea es similar a la creación del complejo hidroacústico en sí, pero una miniatura, que tiene una hélice de batería colocada en un pequeño dispositivo autopropulsado, capaz de reformar desde el submarino en un estado sumergido, y luego seguir la espalda, mientras que proporcionando un enlace constante de doble cara. En los EE. UU., Dichos dispositivos se crean e incluyen en el armamento de los submarinos de la última generación (tipo "Virginia").
4. Desarrollo y creación de nuevos materiales para transductores hidroacústicos que difieren menos que el peso y el costo.
Los convertidores piezocerámicos, a partir de los cuales se crean las antenas para los submarinos, estructuras extremadamente complejas, piezocerámicas en sí mismo, un material muy frágil, y se requieren esfuerzos considerables para darle fuerza, manteniendo la eficiencia. Y mucho tiempo es una búsqueda de un material que tiene las mismas propiedades de la transformación de la energía de la oscilación en electricidad, pero que representa un polímero, duradero, ligero, tecnológico.
Los esfuerzos tecnológicos en el extranjero llevaron a la creación de películas de polímeros del tipo PVDF, que tienen un efecto piezoeno y conveniente para su uso en los diseños de antenas de cubierta (colocadas a bordo de un barco). El problema aquí está principalmente en la tecnología de crear películas gruesas que aseguran suficiente eficiencia de la antena. Aún más prometedor, parece que la idea de crear un material con las propiedades de piezocerámica, por un lado, y las propiedades de la pantalla protectora, las señales de ahogamiento (o dispersión) del hidrolector enemigo, y reduce el ruido del barco de la eIgencraft. . Dicho material (piezoreina), aplicado al cuerpo submarino, en realidad hace que una antena hidroacústica todo el cuerpo de la nave, proporcionando un aumento significativo en la eficiencia de los agentes hidroacústicos. El análisis de publicaciones extranjeras muestra que en los Estados Unidos tal desarrollos han pasado a la etapa de prototipos, mientras que en las últimas décadas no hay progreso en esto en la regla.
5. Clasificación de objetivos.
La tarea de clasificación en hidroacústica es el problema más difícil asociado con la necesidad de determinar la clase del objetivo de acuerdo con la información obtenida en modo de risa (en menor medida, de acuerdo con el modo activo). A primera vista, el problema se resuelve fácilmente: simplemente registre el espectro del objeto de ruido, en comparación con la base de datos, y obtenga la respuesta, qué es el objeto, con precisión hasta el apellido del comandante. De hecho, el espectro de la meta depende de la velocidad del curso, el propósito del objetivo, observado por el complejo hidroacústico, el espectro contiene distorsiones debido al paso de la señal a través de un canal de distribución (medio acuoso) aleatoriamente inhomogéneo. , y por lo tanto depende de la distancia, el clima, el área de acción y muchas otras razones, lo que hace que la tarea de reconocimiento sobre el espectro sea prácticamente intratable. Por lo tanto, se utilizan otros enfoques en la clasificación doméstica relacionada con el análisis de las características características inherentes a una clase específica de objetivos. Otro problema que requiere una investigación científica seria, pero la necesaria necesaria: la clasificación de objetos inferiores y enrollados asociados con el reconocimiento de las minas. Es conocido y confirmado experimentalmente que los delfines ciertamente reconocen con confianza los objetos de aire y de agua en comparación con metal, plástico, madera. La tarea de los investigadores es desarrollar métodos y algoritmos que implementan el mismo procedimiento que realiza un delfín que resuelve una tarea similar.
6. La tarea de la autodefensa.
La autodefensa es una tarea integral de garantizar la seguridad del barco (incluida la protección antinuclear), que incluye la detección, clasificación, designación objetivo, datos de origen emisor en el uso de armas y (o) medios técnicos de oposición. La peculiaridad de este problema es un uso integral de los datos de varios subsistemas para el gas, la identificación de datos de diversas fuentes, y proporciona la interacción de la información con otros sistemas de vehículos que proporcionan armas.
Lo anterior es solo una pequeña parte de aquellas áreas prometedoras de investigación que deben participar para aumentar la eficiencia de las armas hidroacústicas creadas. Pero de la idea al producto, un largo camino, que requieren tecnologías avanzadas, una moderna investigación y base experimental, una infraestructura desarrollada para la producción de materiales necesarios para transductores y antenas hidroacústicas, etc. Cabe señalar que los últimos años se caracterizan por nuestra compañía, una seria reaparición técnica de la base de producción y prueba, que se ha hecho posible gracias a la financiación bajo una variedad de programas federales específicos, tanto civiles como de citas especiales, lo que lleva a la Ministerio de Industria y Comercio de la Federación de Rusia. Gracias a este apoyo financiero en los últimos cinco años, fue posible reparar completamente y mejorar significativamente el grupo de pruebas hidroacústicas más grande de Europa, ubicadas en el territorio de la preocupación del Oyeanpribor OJSC, para actualizar radicalmente las instalaciones de producción de la preocupación de las plantas en serie. , de modo que la planta de taganrog "Surbo" se convirtiera en la empresa de instrumentos más perfecta en el sur de Rusia. Creamos una nueva producción: piezateriales, placas de circuito impreso, en el futuro, la construcción de nuevos espacios industriales y científicos, representa la configuración y el equipo que pasa. Después de 2 a 3 años, la producción y el poder científico de la empresa, apoyado por el "banco de datos" de nuevas ideas y desarrollos, comenzarán a crear un armamento hidroacústico de la quinta generación, por lo que la flota marina de mar.