 Вхід
ВхідІм'я для робота хлопчика. Десятка найбільш незвичайних і просунутих роботів світу
Чоловік з ранку поїхав на дачу. А ми з дітьми влаштували генеральне прибирання. Півтора місяці додому приходили тільки ночувати. "Треба отдраить будинок після цих брудних виборів", - заявила Лера. Поки відчищали, з'ясували, що пилосос майже помер. Вирішили новий купити. Зібралися, було, піти по шляху Колпакова і купити миючий. Понишпорив у інтернеті. Дошарілісь до робота-пилососа. Страшно збудилися. Матвій, покрутивши пальцем біля скроні, звалив в кафе - ніби як не при справах, а ми з Лерой майже в ночі - в цілодобовий "Юлмарт". Поки їхали, мама ридала в трубку від реготу: "Робота? !! Ну ви артистки" ... Від реготу - бо не розуміла до кінця серйозності наших намірів.
У магазині фурор справили з порога. Подивитися на нас збіглися відразу чотири продавця: Олександр, Іван, Гліб і Роберт. "Хороша покупка-то?" - питаю про робота. "Так, - говорить Гліб, - оригінальна". Ми з Лерой іржати кидаємося, пацани-продавці - теж майже валяються. У нас, кажуть, тільки один мужик такий пилосос купив. А інший вчора вертоліт купував з дистанційним керуванням. Може, вертоліт теж візьмете? "Ви нас, - кажу, - спочатку сфотографуйте, - за оригінальність. За вертольотом в інший раз прийдемо. Нам Матвію потрібен". - "Ви до нас обов'язково приходьте на Хеллоуїн, в костюмах", - в сльозах просять продавці. - "А у вас, - уточнюю, - вечірка буде? Все в костюмах будуть?" - "Та яка вам різниця, - іржуть пацани. - Ви, головне, приходьте" ...
Загалом, дістали нашого робота. І знову іржати взялися. Він катається-мете, уперся в мене. Хлопці пояснюють: "Це він до господині принюхується". А ще, коли робот закінчує прибирання, він повинен сам паркуватися (!!!) на базу. "А як-як?" - плачем. "Треба сказати:" Фас !!! "- вчать пацани.
Інструкція, яку нам роздрукували на 28 аркушах, - пісня. наш новий друг з штучним інтелектом приймає рішення згідно поточну обстановку. Ну ви зрозуміли: фас - значить фас, помсти - значить помсти. А якщо він застряє - намагається виплутатися !!! Я мало не розридалася. А коли у нього не виходить виплутатися, він припиняє безглузді спроби і переходить в режим очікування. Тобто нас з Лерой чекає!
"Як же нам назвати нашого нового друга?" - страждає Лера вже кілька годин. - "Головне, - кажу - не Дундук, а то ми його запрограмуємо на тупість" ... "Назвіть Вовою, - пише в смс Наумлюк. - Уявляєш: Володимир, от'ебісь! - або феєричне" Хуй тобі, Володя! "Наумлюк, коротше не зрозумів, що ми з Лерой одного себе завели, а не хлопчика для биття. тому думаємо нашого робота Наумлюком назвати. У тому сенсі:" Давай, Наумлюк, отнаумлючь квартиру. А якщо тупити буде, ми йому завжди зможемо сказати: "Ну і Дундук ти, Наумлюк!".
Загалом, ми зараз приймаємо пропозиції, як нам назвати нашого нового друга, який з будь-якої ситуації в першу чергу намагається виплутатися сам, і тільки в крайніх випадках чекає нас з Лерой. І не приставайте, він ще не сильно наумлючіл. Тому що йому треба 16 годин для початкової зарядки.
А Олександру, Глібу, Івану і Роберту - мільйон променів добра в карму (я тільки заради них назву магазину і написала, щоб всі, хто цінує почуття гумору, бігли до них за покупками і реготом). Кращих продавців я за своє життя не бачила. "Спасибі, - волали на прощання ми з Лерой, - ви нам так настрій підняли". - "А вже ви нам як підняли!" - кричали у відповідь пацани.
P.S. І пропонуйте, будь ласка, як нам робота назвати. Або дійсно Наумлюком?
PPS. Мама, до речі, в легкому шоці. Веліла зателефонувати і доповісти, як робот наумлючіт. Чоловік теж, здається, в шоці. І це ми ще не розповіли, що після прочитання інструкції дізналися, що нашого робота треба раз на місяць пилососити звичайним пилососом))
Який механізм можна назвати роботом?
Як часто буває в молодої галузі людської діяльності, в робототехніці немає ще усталеною, загальновизнаною термінології.
Звернемося до густонаселеному в наш час світу машин і механізмів. Чимале їх число виконує таку роботу, яку ще зовсім недавно людина робила сам. Не будемо далеко ходити за прикладами. Оглянемося навколо. Багато з нас вже не крутять ручку домашньої "млинки" для кави, а включають електричну кавомолку, і вона за кілька секунд подрібнює кавові зерна, т. Е. Робить це за нас. Так само йде справа з електропилкою, електродрилем і т. Д. Але навряд чи ви назвете всі ці механізми роботами. У чому ж справа? Що відрізняє робота, наприклад, від електрифікованого інструменту?
Мал. 12. Дві головні частини робота: 1 - виконавчий механізм ( "рука") і 2 - "мозок" (управляє "рукою" пристрій).
Щоб розібратися в головному, ми не будемо заглиблюватися в питання термінологічного характеру. Приєднаємося до думки тих, хто вважає, що роботом можна назвати такий пристрій, у якого є в сукупності дві основні частини: виконавчий механізм - "рука" 1 і система управління цим механізмом - "мозок" 2 робота (рис. 12). Таке уявлення про роботу відразу ж прояснює питання про те, чому електроінструменти - це не роботи: у них немає, крім простого вимикача, системи, що управляє виконавчим механізмом (пилкою, свердлом і ін.).

Мал. 13. Конструкція промислового робота, компактно об'єднує його "руку" і "мозок"

Мал. 14. Механічна "рука" робота - маніпулятор; 1 - захоплення (робоче ланка).
Виглядає промисловий робот, наприклад, так, як зображений на малюнку 13: у цього робота добре видна "рука" 1, а "мозок" захований в корпусі 2.
Як часто буває в молодої галузі людської діяльності, в робототехніці немає ще усталеною, загальновизнаною термінології. Спори серед фахівців з приводу того, який же механізм можна назвати роботом, не вщухають донині. А люди, не пов'язані з робототехнікою, часто думають, що робот - це пристрій, який виконує за людину ті чи інші трудові операції. Чи так це?
Звернемося до густонаселеному в наш час світу машин і механізмів. Чимале їх число виконує таку роботу, яку ще зовсім недавно людина робила сам. Не будемо далеко ходити за прикладами. Оглянемося навколо. Багато з нас вже не крутять ручку домашньої "млинки" для кави, а включають електричну кавомолку, і вона за кілька секунд подрібнює кавові зерна, т. Е. Робить це за нас. Так само йде справа з електропилкою, електродрилем і т. Д. Але навряд чи ви назвете всі ці механізми роботами. У чому ж справа? Що відрізняє робота, наприклад, від електрифікованого інструменту?
Мал. 12. Дві головні частини робота: 1 - виконавчий механізм ( "рука") і 2 - "мозок" (управляє "рукою" пристрій).
Щоб розібратися в головному, ми не будемо заглиблюватися в питання термінологічного характеру. Приєднаємося до думки тих, хто вважає, що роботом можна назвати такий пристрій, у якого є в сукупності дві основні частини: виконавчий механізм - "рука" 1 і система управління цим механізмом - "мозок" 2 робота (рис. 12). Таке уявлення про роботу відразу ж прояснює питання про те, чому електроінструменти - це не роботи: у них немає, крім простого вимикача, системи, що управляє виконавчим механізмом (пилкою, свердлом і ін.).

Мал. 13. Конструкція промислового робота, компактно об'єднує його "руку" і "мозок"

Мал. 14. Механічна "рука" робота - маніпулятор; 1 - захоплення (робоче ланка).
Виглядає промисловий робот, наприклад, так, як зображений на малюнку 13: у цього робота добре видна "рука" 1, а "мозок" захований в корпусі 2.
Найскладніша частина в конструкції робота - це, як і в організмі людини, - "мозок". Тому почнемо знайомство з роботом з простіший його частини - виконавчого механізму.
Якщо ви плануєте відкрити власний клуб робототехніки, але не впевнені, що зможете самостійно вибрати відповідне назви, ця стаття допоможе вам з легкістю вибрати кращий варіант. В даній статті наведені приклади назв уже існуючих гуртків, які працюють по всьому країні, а також описані способи побудови подібних імен.
Принципи формування назв шкіл робототехніки
Всі подібні назви можна умовно розділити на дві основні групи. Ознайомившись з описом кожної з них, а також вивчивши наочні приклади, підприємець зможе швидко і без зусиль створити власний, яскравий і запам'ятовується варіант.
- Назви, що включають слово «робот», «Роббі», «робо». Використання даних ключових слів робить назву максимально тематичним, тобто вибираючи цей метод, ви гарантуєте собі, що ваш клуб не спутають ні з мовною школою, ні з магазином електроніки. Вони також можуть бути досить різноманітними, в основному завдяки використанню інший лексики або зміни самого ключового слова, Наприклад, «Роботекс», «Лабораторія Робототехники», «Ліга роботів», «Роббі» і т.д.
- Інші назви. Абсолютна більшість імен з даної категорії також є тематичними, тобто асоціюються з роботами, технікою або ж просто знаннями, наприклад, «Біном Ньютона», «Железяки», «Академія геніїв», «Розумні модулі», «Електроніка» і т.п.
Роботи. Поки що це екзотика, але тим не менш, вони все впевненіше входять у наше життя. Три закони робототехніки Айзека Айзімова скоро перестануть бути тільки розважальної літературою. Роботи - істоти, які одночасно зачаровують і лякають своєю людяністю і одночасно машин. Виробництво роботів розвивається постійно. Подивіться на десятку найцікавіших екземплярів на сьогоднішній день.
ASIMO: Робот-гуманоїд

ASIMO - це робот-гуманоїд, створений компанією Хонда. Зростанням в 130 сантиметрів і вагою в 54 кілограми, робот схожий на маленького астронавта, який несе рюкзак. Він вміє ходити на двох ногах, копіюючи людську ходу швидкістю в 6 км / год. ASIMO був створений в Японії в «Центрі досліджень і розвитку» Хонди. ця остання модель в серії, а всього їх одинадцять, перший робот був створений в 1986 році.
Офіційно ім'я робота - це скорочення від "Advanced Step in Innovative MObility", тобто буквально «Високий рівень крок в передовій мобільності» .в 2002 році існувало 20 роботів ASIMO. Кожен коштує мільйон доларів за виробництво, і деякі екземпляри можна взяти напрокат за 150 тисяч доларів на місяць.
Розпізнавання об'єктів, що рухаються
Використовуючи зорову інформацію, яку збирає вмонтована в голову робота відеокамера, ASIMO розпізнає руху безлічі об'єктів, а також оцінює відстань від них і їх напрям. За допомогою комплексу цих технологій робот може стежити за переміщеннями людей камерою, слідувати за людиною або привітати його, коли він наближається.
Розпізнавання поз і жестів
ASIMO уміє інтерпретувати позиції і руху руки, розпізнавати пози і жести. Завдяки чому робот може реагувати не тільки на голосові команди, а й на природні рухи тіла людей. Таким чином він, наприклад, розуміє, коли йому пропонують рукостискання або коли людина йому махає, і відповідає взаємністю. Крім того, він розуміє, коли йому вказують напрямок руху.
Розпізнавання навколишнього середовища
ASIMO уміє аналізувати навколишні об'єкти і ландшафт і діяти так, щоб це було безпечно для нього і знаходяться поруч. Наприклад, він дізнається потенційно ризиковані об'єкти, такі, як сходи, а також зупиняється або обходить людей і інші рухомі об'єкти, щоб не зіткнутися з ними.
розпізнавання звуків
Можливості робота розпізнавати рід звуків заглибилися, і тепер він знає різницю між голосами та іншими звуками. Він відповідає на своє ім'я, повертається обличчям до людини, з яким розмовляє, реагує на раптові незвичні звуки на зразок впав предмета або зіткнення, і повертає голову в цьому напрямку.
розпізнавання облич
ASIMO може дізнаватися людські обличчя, навіть коли людина рухається. Він може окремо розрізняти 10 людських облич. Коли їх зареєструють в його пам'яті, він буде звертатися до них по імені.

Albert Hubo: робот-Ейнштейн

Робот Альберт Хубо (Albert HUBO) - андроїдний робот. його зовнішній вигляд складає голова, яка копіює голову вченого Альберта Ейнштейна, і тулуб досить відомого гуманоїдного робота Хубо. Період розробки склав три місяці і завершився в листопаді 2005 року. Голова була розроблена компанією Hanson-Robotics. Тіло зроблено з специфічного матеріалу, Frubber, який часто застосовують в Голлівуді.
Голова має 35 суглобів, завдяки чому може виражати різні емоції на обличчі, користуючись незалежними рухами очей і губ. Також в голові є дві CCD камери для візуального розпізнавання. Крім того, Альберт вміє витворяти все властиві Хубо уявлення, тому можливо висловлювати ще більше природних людських рухів і манер поведінки. У тілі заховані полімерні літієві батареї, які забезпечують близько двох з половиною годин автономної роботи робота.
За допомогою віддаленої мережі роботом Альбертом можна управляти з зовнішнього комп'ютера. Вперше Альберт Хумо був представлений в 2005 році на саміті АПЕК в Пусані (Корея). Його похвалили багато світових лідерів: президент США, прем'єр-міністр Японії тощо

Stanley: самоврядні транспортний засіб
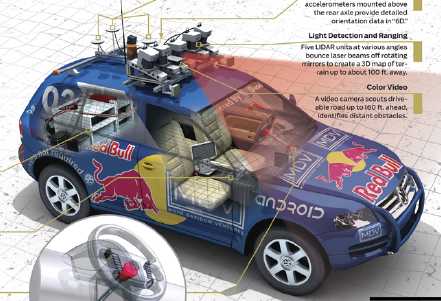
Стенлі (Stanley) - це автономне засіб пересування, створене гоночної командою Стенфордського університету. Це звичайний Фольксваген Туарег, доопрацьований до можливості управління тільки бортовими комп'ютерами. Він брав участь і переміг у DARPA Grand Challenge в 2005 році і приніс Стаенфордской гоночної команді приз розміром в два мільйони доларів, найбільший грошовий приз за всю історію роботів.
Сенсори, використані в Стенлі, включають в себе п'ять лазерних лидаров, пару радарів, стереокамерами і одиноб'єктивними камеру. Обробляють інформацію і визначають позицію машини GPS-приймач, GPS-компас, інерційна система управління, а інформацію про одометра коліс отримує внутрішня CAN шина Туарега. Комп'ютерна частина - це шість потужних комп'ютерів Intel Pentium M з різними конфігураціями і операційними системами Лінукс.
Стенлі наділена системою виявлення наближаються перешкод. Дані з лидаров скомбіновані з зображеннями з візуальної системи, щоб скласти більш повну картину огляду. Якщо прийнятну дорогу неможливо розпізнати хоча б на найближчі 40 метрів, швидкість знижується, а лідари шукають безпечний шлях.
До речі, водіння Стенлі програмували, користуючись записом людського водіння в пустелі, а потім встановлюючи точне значення кожного біту інформації, створюваної його системою сенсорів. Після цієї модифікації машина-робот почала кататися зі швидкістю 45 миль на годину по дорогах, пересіченим тінями дерев. Поки точні значення для даних не були задані, машина злякано звертала з дороги, впевнена, що шлях пересічений НЕ тінями, а ямами.

BigDog: робот-мул
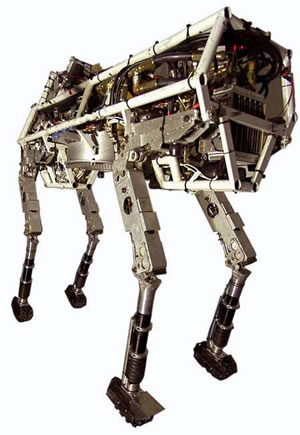
БогДог (BigDog, буквально - Великий Пес) - це чотириногий робот, створений компанією Boston Dynamics в 2005 році. Проект БігДог фінансувало Агентство захисту передових досліджень в надії, що це створення зможе служити роботом-мулом для солдатів на занадто грубою для транспорту місцевості.
БігДог важить 75 кілограмів, він метровий в довжину, а в висоти - 0, 7 метра. на наразі він може подорожувати по важкій для пересування місцевості зі швидкістю 5,3 км / год, нести вагу в 54 кілограми і дертися по схилах нахилом в 35 градусів.

RiSE: дереться робот

Райз (RiSE) - це маленький шестиногу робот, який забирається по вертикальних поверхнях: стін, деревам, парканів. На п'ятах Райза є кігті, мікрокогті або липкий матеріал, в залежності від поверхні, по якій треба лазити. Робот змінює пози, щоб пристосуватися до нахилу поверхні, а зафіксований хвіст допомагає балансувати на крутих поверхнях. Малюк важить всього 2 кілограми, в довжину складає 0,25 метра, бігає зі швидкістю 0,3 м / с.
Кожна з шести лап робота оснащена двома електромоторами. Бортовий комп'ютер управляє лапами, визначає спосіб комунікації з землею і обслуговує різноманітні сенсори. У тому числі сенсор, який розраховує інертність, сенсор позиції суглоба для кожної лапи, сенсор натягу лап і датчик контакту ступень.
Майбутні версії Райза використовуватимуть сухе прилипання, щоб дертися по абсолютно гладким стрімких поверхнях, таким як скло і метал. Райз розробили спільно дослідники Пенсільванського університету, університетів Карнегі Меллон, Берклі, Стенфорда, а також університету Льюїса і Кларка. Проект спонсорував Офіс захисту науки DARPA.

QRIO: танцюючий робот
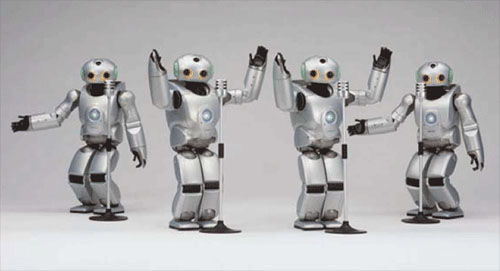
QRIO ( "Quest for cuRIOsity" - «Завдання для цікавості») - це двоногий гуманоїдний робот для розваги, створений і проданий Соні, щоб не згасав успіх їх іграшки AIBO (робот-собачка). QRIO має зріст в 0,6 метра і важить 7,3 кілограма.
Робот вміє розпізнавати голоси і обличчя, завдяки чому може запам'ятовувати людей і їх пристрасті і антипатії. Він вміє бігати зі швидкістю 23 см в секунду, що зафіксовано в Книзі рекордів Гіннеса (2005 року) як перший, самий швидкісний, двоногий робот, який бігає. Робот QRIO четвертого покоління працює від батареї годину.
Четверте покоління цих роботів вміє танцювати під Hell Yes, музичний кліп виконавця Beck. Ці екземпляри доповнені третьою камерою на лобі, і у них поліпшили руки і зап'ястя. Програмісти працювали три тижні, щоб навчити цих роботів хореографії.